Режими роботи контролера.
Регулювання температури припливного повітря в системі з водяним калорифером. Це основний режим роботи ТРМ133. При вході в цей режим прилад відкриває жалюзі і включає припливний вентилятор (рис. 2.2.21).
Рис 2.2.21. Схема підключень контролера припливної вентиляції ТРМ 133
Нагрів припливного повітря. ТРМ133 забезпечує підтримку на заданому рівні температури повітря припливного Тпр за допомогою калорифера. Для цього прилад управляє положенням K3Р, який регулює потік теплоносія, що подається в калорифер. Прогрів калорифера. Контролер здійснює прогрівання калорифера перед початком роботи, а також після виходу з режимів: ЧЕРГОВОГО, ЛІТНЬОГО або ЗАХИСТУ ВІД ЗАМЕРЗАННЯ. Час прогрівання визначається користувачем, виходячи з експлуатаційних параметрів системи. Для забезпечення максимальної циркуляції теплоносія через калорифер ТРМ формує команду на повне відкриття КЗР. Вентилятор при цьому вимкнений, жалюзі закриті. Захист від перевищення температури зворотної води, що повертається в теплоцентраль, здійснюється залежно від температури зовнішнього повітря відповідно до графіка. Графік зворотної води задається користувачем. Якщо температура ТЗ В, виміряна датчиком, перевищує Тзв.мах., прилад перериває управління КЗР по Тпр. і переходить на управління зв сигналом розузгодження між поточним значенням Тзв. і обчисленим за графіком Tзв.гр. Після повернення Тзв. в допустимі межі регулювання продовжується по Тпр. Захист від замерзання води в калорифері. Замерзання води в калорифері загрожує руйнуванням всієї системи. Тому, при падінні температури зворотної води Тзв або температури припливного повітря Тпр. нижче за критичні значення, ТРМ133 переводить систему в режим “Захисту від замерзання води в калорифері”. Для максимально швидкого підвищення температури ТРМ формує команду на виключення вентилятора, закриття жалюзі і повне відкриття КЗР. Контролер переводить систему в режим “Захисту від замерзання” також при виникненні несправності будь-якого з вхідних датчиків (обрив, коротке замикання) і при спрацьовуванні контактного датчика С4. Режими ДЕНЬ/НІЧ – перемикання за годинником реального часу. Для підтримки комфортної температури в приміщенні в денний час і зниження її після закінчення робочого дня (в цілях економії енергії) контролер автоматично перемикає режими ДЕНЬ/НІЧ. Перемикання відбувається за вбудованим годинником реального часу. При програмуванні задаються дві уставки Тпр – денна і нічна, а також час початку і закінчення робочого дня. Літній режим. Це економічний режим, оскільки регулювання температури припливного повітря не відбувається. КЗР в цьому режимі повністю закритий і циркуляція води через калорифер припинена. Здійснюється тільки вентиляція приміщення (жалюзі відкриті, вентилятор включений) і діагностика обладнання. ТРМ133 автоматично переводить систему в “Літній режим”, коли температура зовнішнього повітря Тз. стає вище за значення Т вст.літ, заданого при програмуванні приладу. Поріг для відключення “Літнього режиму” також задається користувачем. Черговий режим. “Черговий режим” передбачений для випадків, коли в роботі вентиляції немає необхідності (нічний час доби, вихідні дні та ін.). У цьому режимі ТРМ133 закриває жалюзі, вимикає вентилятор і контролює тільки температуру зворотної води за графіком. Перехід в “Черговий режим” здійснюється: дистанційно за допомогою зовнішнього комутуючого пристрою С1; за аварійним повідомленням від датчика контролю справності вентилятора С2 або пожежної сигналізації С5; установкою відповідного програмованого параметра (з клавіатури приладу або з ПК).
Питання для самоконтролю 1. Як впливають негативні аероіони на тварин? 2. Для чого призначений іонізатор ИЭ-1? 3. Для чого призначена автоматизована система “Каштан-Т”? 4. Які режими має контролер ТРМ133? 5. Як здійснюється надійність і безпека роботи системи припливної вентиляції контролером ТРМ133? ТЕСТИ 1. Який автоматичний пристрій використовується для керування іонізатором ИЭ-1? А. Програмне реле часу В. Терморегулятор С. Реле часу 2. Для чого призначена автоматизована система вимірювання температури в пташнику “Каштан-Т”? A. Призначена для вимірювання температури в пташинку і зовнішнього повітря та показу вимірювань на цифрових індикаторах, реєстрація на папері за допомогою цифродрукуючого пристрою один раз за 1, 2, 4 або 8 год послідовно у всіх пташниках. B. Призначена для вимірювання температури в пташинку і зовнішнього повітря у всіх пташниках. C. Призначена для показу вимірювань на цифрових індикаторах, реєстрації на папері за допомогою цифродрукуючого пристрою один раз за 1, 2, 4 або 8 год послідовно у всіх пташниках. 3. Які пристрої використовуються для вимірювання температури в автоматизованій системі вимірювання температури в пташнику “Каштан-Т”? A. Нормуючі перетворювачі B. Нормуючі перетворювачі з датчиками температури типу ТСМ С. Датчики температури типу ТСМ 4. Для чого призначені дискретні входи контролера ТРМ133? А. Для підключення датчиків контроля справності припливного повітря, пожежної сигналізації. В. Для перемикання режимів роботи. С. Для прогріву калорифера.
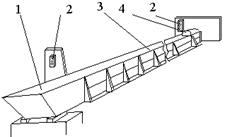
2.3. АВТОМАТИЗАЦІЯ ГОДУВАННЯ ТА НАПУВАННЯ ТВАРИН І ПТАХІВ 2.3.1. Автоматизація годування тварин і птахів Процес роздачі кормів є одним із найбільш трудомістких на тваринницьких та птахівницьких фермах. Технологія роздачі кормів знаходиться в тісному зв’язку з загальним технологічним циклом, прийнятим на фермі. Головною умовою оптимальності годування тварин є збалансованість кормів і необхідна періодичність та дозованість їх видачі. Виходячи з цього, до кормороздавальних пристроїв ставляться такі вимоги: рівномірність роздачі корму в годівниці з відхиленням маси від норми з розрахунку на одну голову не більше 10%; втрати корму не більше 3%; тривалість роздачі корму не більше 30 хв для мобільних і 20 хв для стаціонарних кормороздавачів; можливість регулювання норми корму від максимального до мінімального значення. Потребу в кормороздавальних пристроях, їх марку та кількість визначають з урахуванням виду та віку тварин і птахів, способів їх утримання, раціонів годування, норм видачі корму одній тварині, розрахункового поголів’я тварин. Для роздачі корму на фермах використовують, як мобільні, обмежено-мобільні і стаціонарні кормороздавачі. Зараз одержали поширення два основних види годівлі тварин та птахів – ненормоване і нормоване. У ненормованому випадку кількість корму не нормується, а в другому кожній тварині та птахові залежно від його продуктивності і деяких інших факторів видається визначена індивідуальна роздача корму. Найчастіше з метою спрощення технології годівлі на фермах застосовують групове нормування, коли кормовий раціон розраховують, виходячи з потреб середньої групи тварини чи птахів. На великих тваринницьких комплексах з характерними для них сучасною машинною технологією і потоковістю виробництва виникає нагальна потреба застосування автоматизованих систем керування, що дозволяють найбільш повно й ефективно використовувати устаткування, значно знизити трудові витрати і вартість продукції, збільшити продуктивність і поліпшити умови праці. У таких системах, як правило, відбувається об’єднання декількох технологічних операцій у загальну потокову лінію з місцевим, дистанційним та автоматизованим керуванням електроприводами машин і механізмів. Найчастіше спільно проектуються лінії транспортування і роздачі кормів. Системи автоматизації повинні забезпечувати послідовність автоматичного і ручного включення машин і механізмів в порядку, зворотному напрямку руху корму, щоб виключити завал машини, зупинку потокової лінії в заданій послідовності у випадку аварійної зупинки однієї з машин; контроль і сигналізацію роботи всіх машин і механізмів. Кормороздача на фермах ВРХ обумовлюється, в основному, раціоном годування та способом утримання тварин. Кормороздавачі типу РВК-Ф-74, ТВК-80, КЛО-75 відносяться до стаціонарних і призначені для роздавання всіх видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання тварин з розподілом кормів вздовж кормового жолоба рухомою стрічкою чи пластинчастим транспортером. Вони відрізняються між собою будовою розподільного транспортера та конструкцією приводної станції. Роздавач всередині годівниці РВК-Ф-74 (рис. 2.3.1) призначений для роздавання зелених, грубих і соковитих кормів та кормових сумішей при утриманні корів на прив’язі. Це ряди годівниць, всередині яких змонтовано транспортер. Транспортер-кормороздавач складається з годівниць, завантажувального бункера, приводної станції, стрічкового транспортера. Привод складається із рами, на якій розміщено електродвигун. Передача крутного моменту з нього на ведучий вал стрічкового транспортера від приводної станції здійснюється через ланцюгову передачу. Робочий орган – це стрічка з прикріпленим до неї канатом і круглоланковим ланцюгом.
Рис. 2.3.1. Технологічна схема кормороздавача РВК-Ф-74: 1 – завантажувальний бункер; 2 – кнопковий пост; 3 – годівниця; 4 – привід Процес роботи виконується таким чином. Мобільним роздавачем корм завантажується в завантажувальний бункер. Приведення в рух стрічкового транспортера забезпечує переміщення корму вздовж годівниці. При досягненні стрічки з кормом кінця фронту кормороздачі транспортер зупиняється. Перед початком наступної годівлі, при зворотному русі стрічкового транспортера, виконується очищення стрічки від залишків корму, які скидаються в приямок. При досягненні робочим органом вихідного положення привод зупиняється. Принципова електрична схема кормороздавача РВК-Ф-74 зображена на рисунку 2.3.2. Ввідним апаратом щита керування кормороздавача є автоматичний вимикач QF1, який також забезпечує захист електродвигуна від коротких замикань. Принципова електрична схема керування кормороздавачем передбачає управління реверсивним електродвигуном переміщення робочого органа за допомогою кнопкових постів SB1, SB2 з двох місць в режимі роздачі корму та видалення відходів. В схемі передбачено включення звукового сигналу HA про початок роздачі корму та видалення відходів. Тобто кнопковим постом спочатку вмикається реле часу КТ1 чи КТ2, які забезпечують витримку часу на включення електродвигуна переміщення після подачі звукового сигналу. Зупинка двигуна переміщення робочого органа при роздачі корму та видаленні відходів виконується автоматично кінцевими вимикачами SQ1 та SQ2.
Рис. 2.3.2. Принципова електрична схема кормороздавача РВК-Ф-74
Захист електродвигуна від перевантажень здійснюється тепловим струмовим реле КК1. Про подачу напруги на шафу керування сигналізує лампа HL.
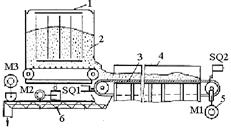
Рис. 2.3.3. Технологічна схема транспортера-кормороздавача ТВК-80Б Автоматизована потокова лінія роздачі кормів ТВК-80Б призначена для роздавання всіх видів кормів (крім концентрованих і рідких) в умовах прив’язного утримання тварин. Це рухома стрічка (рис. 2.3.3) у годівницях 4, що приводитися в дію реверсивним електроприводом 5. При русі вперед стрічка несе до стійла тварин завантажену живильником 1 визначену кількість корму. Як живильник може бути використаний кормороздавач КТУ-10, що має накопичувальну ємкість 2. З поверненням стрічки (реверс) годівниці самоочищаються від залишків корму, що віидаляється з приміщення транспортером 6.
Рис. 2.3.4. Принципова електрична схема керування
|