Приклади побудови умовних позначень окремих 6 страница
При виникненні аварійної ситуації “МПЗК-50” розімкне контакти 4-5,реле керування Р1,кола керування електродвигуна і на індикаторі струму зафіксує код аварії. За кодом аварії оперативно можна визначити причину відключення електродвигуна. Для поновлення роботи електродвигуна необхідно усунути причину виникнення аварії і натиснути кнопку “ Скидання”. Для дистанційного контролю роботи й аварії електродвигуна можна використати контакти реле керування Р2. У робочому режимі “МПЗК-50”, контакти 6–7 замкнуті, а 7–8 – розімкнуті. При виникненні аварії розмикаються контакти 6 –7 і замикаються контакти 7–8. Пристрій для керування заглибними насосами САУ-М2 використовується в системах автоматичного підтримання рівня рідини в резервуарах, накопичувальних ємкостях, відстійниках, а також в системах автоматичного осушення. Пристій виконує наступні автоматичні функції: · автоматичне заповнення резервуару до заданого рівня; · автоматичне осушення резервуару до заданого рівня; · захист заглибного насоса від “сухого” ходу. Пристій працює з різними за електропровідністю рідинами: водопровідною, забрудненою водою, молоком і харчовими продуктами (слабокислотними, лужними та ін.). Автоматичне заповнення резервуару (бака) до заданого рівня здійснюється приладом наступним чином (рис 2.1.14). Коли рівень рідини в резервуарі (баку) доходить до нижньої відмітки, на якій встановлений довгий електрод датчика бака, резервуар автоматично заповнюється до верхнього рівня, на якому встановлений короткий електрод датчика бака.
Рис. 2.1.14. Функціональна схема приладу
До входів САУ-М2 підключаються два трьохелектродні кондуктометричні датчики: · датчик рівня рідини в баку (заповнюваної місткості); · датчик рівня рідини в свердловині (місткості, призначеної для відбору рідини). Компаратори 1...4 сприймають сигнал від датчиків і порівнюють значення вхідного сигналу з заданим значенням і видають (відповідно до умов блоку логіки 1) сигнал на включення або виключення реле “НАСОС”, до якого підключений електропривод насоса. Реле “НАСОС” включається при осушенні електрода нижнього рівня (тобто довгого електрода) датчика бака або вимикається при затопленні електрода верхнього рівня (тобто короткого електрода) датчика бака. При використанні САУ-М2 для осушення резервуара до входу прилада підключається тільки один датчик – рівня рідини в свердловині (місткості, призначеної для відбору рідини). Реле “НАСОС” вимикається при осушенні довгого електрода (тобто електроду нижнього рівня) датчика. Прилад САУ-М2 має регулятор чутливості, що дозволяє змінювати рівень опорних сигналів компараторів. Обертанням ручки регулятора на лицьовій панелі прилад легко настроюється для роботи з різними за електропровідністю рідинами.
Рис. 2.1.15. Схема підключення САУ-М2 при використанні його для заповнення резервуара за допомогою заглибного насоса із захистом від “сухого” ходу (за необхідності захисту від “сухого” ходу на клеми 4,5,6 ставиться перемичка)
При осушенні довгого електрода (тобто електрода нижнього рівня) датчика свердловини реле “НАСОС” вимикається, що приводить до блокування роботи насоса. На лицьовій панелі приладу при цьому включається світло-діод “блокування”. На лицьовій панелі приладу розташовані три світлодіодних індикатори, що сигналізують постійним свіченням про наявність живлення на приладі, включення електроприводу насоса та блокування роботи насоса при осушенні датчика рівня рідини в свердловині. Ручка потенціометра – регулятора чутливості – служить для первинної наладки приладу залежно від електропровідних властивостей рідини. Технічна характеристика приладу. Номінальна напруга живлення приладу – 220 В частотою 50 Гц. Допустимі відхилення напруги живлення від номінального значення -15...+10 %. Кількість датчиків, що підключаються, – два 3-електродних. Тип датчиків – кондуктометричний. Кількість вбудованих вихідних реле – 1; Максимально допустимий струм, комутований контактами вбудованого реле – 8 А при 220 В 50 Гц. Напруга на електродах датчика рівня – не більше 12 В постійного струму. Опір рідини, що викликає спрацьовування датчика – не більше 500 кОм. Тип корпусу – настінний Н. Габаритні розміри корпусу –130 × 105 × 65 мм. Ступінь захисту корпусу – 1Р44. Умови експлуатації приладу: температура навколишнього повітря - 1... +50 °С; атмосферний тиск – 86–106,7 кПа; відносна вологість повітря (при +35 °С) – не більш 80 %. Питання для самоконтролю 1. Призначення приладу “МПЗК-50”. 2. Функціональні можливості станції керування з мікропроцесорним приладом “МПЗК-50”. 3. Які функції виконує пристрій САУ-М2? ТЕСТИ 1. Використовуючи схему підключень водонасосної установки з приладом типу “МПЗК-50”, вкажіть, як забезпечити роботу станції без датчика "сухого ходу"? A. Замовити блок керування з вказаною функцією. B. Зняти датчик ДСх. C. Замість датчика ДСх встановити перемичку на затискачах 9–10. 2. Для чого використовується регулятор чутливості в приладі САУ-М2? А. Дозволяє легко настроюватися для роботи з різними за електропровідністю рідинами. В. Дозволяє легко настроюватися на тиск води н напірному трубопроводі. С. Дозволяє легко настроюватися на величину рівня води. 2.1.5. Автоматизація перекачування стічних вод
Для відкачки стічних, дренажних і господарсько-лекальних вод використовують низьконапірні (8...95 м) високопродуктивні (16...9000 м3/год) каналізаційні електронасоси. Каналізаційні насоси мають ряд відмінних рис. Такі насоси мають незабруднююче одно-трилопатеве розширене робоче колесо, яке з’єднує насос з напірним трубопроводом. Звичайно ці установки мають просту конструкцію, вони обладнані кнопковою станцією дистанційного керування електронасосним агрегатом за допомогою магнітних пускачів. Як приклад розглянемо систему автоматичного керування двохагрегатною водовідливною насосною станцією (рис. 2.1.16). Вручну агрегати вмикають і вимикають кнопками SB1...SB4, а в автоматичному режимі – за допомогою електродних датчиків рівня SL1...SL4. Засувки 1 і 5 з ручним приводом закривають при ремонті насосів. При роботі насосів вони відкриті. Зворотному потоку рідини через непрацюючий насос 4 та труби 3 і 7 запобігає клапан 2. Стічні води і гнойова рідина збираються в резервуар 6. В міру підвищення рівня рідини вони перемикнуть проміжки електродів нижнього рівня SL1, SL2 і загальний електрод 8 (заземлена труба). Спочатку від датчика SL2 вмикається один насос. Якщо приплив стічних вод більше, ніж продуктивність насоса, то рівень стоків підвищується і датчиком SL3 вмикається другий електронасос.
Рис. 2.1.16. Технологічна (а) і принципові електричні (б) схеми керування двохагрегатної відкачувальної насосної станції
Черговість вмикання агрегатів визначається перемикачем SA3. Наприклад, у положенні 1 перемикача SA3 спочатку від датчика SL2 спрацьовує реле KV1, що вмикає електродвигун M1 першого насоса, а потім від датчика SL3 – реле KV2 і другий електронасос М2. У положенні 2 перемикача черговість вмикання насосів буде зворотною. Другими парами контактів реле KV1 і KV2 шунтують через датчик SL1, ланцюга датчиків SL2 і SL3. Завдяки цьому шунтуванню відключення реле KV1 і KV2, а потім і насосів при зниженні рівня стічної води відбудеться тільки тоді, коли розімкнеться ланцюг датчика SL1 нижнього рівня. Якщо продуктивність двох агрегатів виявляється менше припливу стічних вод, то від підвищення рівня замикається ланцюг датчика SL4 і спрацьовує реле KV3, що включає аварійно-попереджувальну звукову НА і світлову HL2 сигналізації. Ця ж сигналізація спрацьовує від реле KV4 при зникненні напруги живлення. Ланцюги аварійної сигналізації одержують живлення від незалежного джерела.
Питання для самоконтролю 1. Для чого призначена двохагрегатна водовідливна насосна станція? 2. Як технологічно працює двохагрегатна водовідливна насосна станція? ТЕСТИ
1. Використовуючи принципову електричну схему двохагрегатної водовідливної насосної станції, вкажіть, за допомогою чого здійснюється керування в автоматичному режимі? A. За допомогою кнопок SB1...SB4. B. За допомогою електродних датчиків рівня SL1...SL4. C. За допомогою перемикачів SА1...SА3. 2. Використовуючи принципову електричну схему двохагрегатної водовідливної насосної станції, вкажіть за допомогою яких електродних датчиків рівня вмикається установка? A. За допомогою електродних датчиків рівня SL3, SL2. B. За допомогою електродних датчиків рівня SL1, SL2. C. За допомогою електродних датчиків рівня SL4, SL3. 3. В якій установці використовуються чотири електродні датчики рівня? A. У водонасосній установці із станцією керування типу УСУЗ. B. У водонасосні установці з контролем рівня води у водонапірному баку. C. В установці відкачування стічних вод. 2.1.6. Автоматизація зрошувальних установок
Поверхневе зрошування – найпростіший спосіб, при якому використовуються закриті трубопроводи або відкриті канали. Вода розподіляється системою розподільних і поливних каналів та лотків, обладнаних гідравлічними регуляторами витрати. Дощування – поширений спосіб машинного зрошування, що ефективно підвищує вогкість і знижує температуру в приземному шарі повітря. Дощувальні системи добре піддаються механізації і автоматизації.
Рисунок 2.1.17. Схема автоматизації стаціонарної системи дощування: 1 – насосна станція; 2 – перепускний клапан; 3 – напірний клапан; 4 – магістральний напірний трубопровід; 5 – поливні трубопроводи; 6 – дощувальні апарати
Схема стаціонарної системи дощування з програмним керуванням показана на рис. 2.1.17. Система складається з насосной станції 1, магістрального напірного трубопроводу 4 і поливних трубопроводів 5 зі встановленими на них дощовими апаратами 6, кожний з яких підключений до трубопроводу через трипозиційний гидроклапан. При подачі води в напірний трубопровід відкриваються гидроклапани дощувальних апаратів першого ряду (найближчі до напірного трубопроводу). Через заданий час програмний пристрій КS1 формує короткочасний імпульс зниження тиску в напірному трубопроводі за рахунок закриття напірного клапана 2 і відкриття перепускного клапана 3. Кожен такий імпульс приводить до закриття гідроклапанів діючого ряду дощувальних апаратів і відкриття наступного. Перевага описаної системи – відсутність необхідності в спеціальних каналах зв’язку на зрошуваній площі, недолік – можливість зміни норми поливу тільки від одного дощувального апаратадо іншого в строгій послідовності. Краплинне зрошування – найекономічніший спосіб зволоження, при якому вода подається прямо в кореневий шар невеликими дозами через спеціальні водовипускні отвори (крапельниці), встановлювані через кожні 50...100 см на зволожуючих трубопроводах. Управління системою краплинного зрошування повинне забезпечувати потрібну черговість зволоження окремих ділянок і коректувати норму поливу кожного з них. Перше завдання розв’язується за допомогою клапанів з електромагнітним приводом, керованих програмним пристроєм, друга – зміною тиску в розподільних трубопроводах, а також дозуванням часу роботи окремих секцій ділянки, що поливається.
Рис. 2.1.18. Система автоматичного управління краплинним зрошуванням: 1 – блок завдань; 2 – блок елементів; 3 – логічний блок порівнянь; 5 – грунт; 6 – вологоміри Система автоматичного управління краплинним зрошуванням показана на рис. 2.1.18. Програма, що визначає черговість і час зрошування ділянок, вводиться в блок завдання і відпрацювання програми 1. Сигнал дозволу поливу ділянки надходить на блок елементів 2 і логічний блок 3 порівняння, де порівнюються задане і дійсне значення вологості, вимірювані вологомірами 6. При дефіциті вологості логічним блоком 2 виконується команда на управління відповідним виконавчим механізмом 4. Питання для самоконтролю 1. Для чого призначені зрошувальні установки? 2. Як розподіляється вода при поверхневому зрошувані? 3. Як здійснюється полив за допомогою дощувальної установки з програмним керуванням? 4. Як здійснюється краплинне зрошування? ТЕСТИ
1. Які пристрої використовуються при поверхневому зрошуванні ґрунту? А. Реле часу. В. Гідравлічні регулятори витрат. С. Електроклапан. 2. Які пристрої використовуються в стаціонарній дощувальній установці? А. Реле часу. В. Трипозиційний гидроклапан та програмний пристрій С. Електроклапан. 3. Черговість зволоження окремих ділянок при краплиному зволоженні здійснюється за допомогою... А. Клапанів з електромагнітним приводом, керованих програмним пристроєм. В. Гідравлічних регуляторів витрат. С. Реле часу. 4. Коректування норми поливу при краплиному зволоженні здійснюється... А. Зміною тиску в розподільних трубопроводах, а також дозуванням часу роботи окремих секцій ділянки. В. Зміною тиску в розподільних трубопроводах. С. Реле часу. 2.2. АВТОМАТИЗАЦІЯ МІКРОКЛІМАТУ В ТВАРИННИЦЬКИХ ТА ПТАХІВНИЦЬКИХ ПРИМІЩЕННЯХ 2.2.1. Технологічні основи регулювання мікроклімату у тваринництві і птахівництві
Під мікрокліматом розуміють сукупність параметрів повітря – температуру, вологість, швидкість переміщення, газовий склад, – які характеризують його стан в приміщенні. Мікроклімат як сукупність умов є важливим фактором забезпечення нормального існування і продуктивності сільськогосподарських тварин та птахів. Він також впливає на стан самої споруди і технологічне обладнання. Вплив різних факторів навколишнього середовища на організм тварини виявляється в глибоких і серйозних змінах фізіологічних процесів останнього: кровообігу, дихання, терморегуляції, газообміну і обміну речовин, що, у свою чергу, впливає на резистентність організму і, природно, на продуктивність тварин. Як свідчить досвід роботи у тваринництві та птахівництві, при утриманні тварин і птахів в нормальних умовах за параметрами мікроклімату збільшується продуктивність тварин, зберігається поголів’я і знижуються витрати кормів. Збільшення продуктивності тварин і птиці: надої молока – на 10–15%, привіси – на 7–12%, яйценосність – на 25–30%. Зберігаємість поголів’я тварин – на 5–10%, а птиці – на 20%, порівняно з утриманням без систем регулювання мікроклімату. Витрати кормів зменшуються у середньому на 15%. Мікроклімат у тваринницьких та птахівницьких приміщеннях залежить від багатьох умов – місцевого (зонального) клімату, теплозахисних властивостей конструкцій будівлі, рівня повітрообміну, ефективності вентиляції, обігріву, стану каналізації, способів збирання і видалення гною, освітлення, а також від виду і віку тварин і птахів, особливостей їхньої фізіології й обміну речовин, щільності розміщення, типу годівлі та ін. Систему опалення для обігріву різних видів тварин і птахів вибирають залежно від кліматичних умов, виходячи з санітарно-гігієнічних і зоотехнічних вимог, економічної доцільності, виробничих умов та інших показників. Для тваринницьких приміщень і пташників застосовують, в основному, повітряне опалення. В родильних відділеннях, профілакторіях, відділеннях для молочних телят, свинарниках-маточниках, молочних, кормоцехах і приміщеннях для обслуговуючого персоналу обладнують систем водяного чи парового опалення від централізованої чи загальнофермської котельні. До установок повітряного обігріву відносять установки “Клімат-2”, “Клімат-3”, теплогенератори, електрокалориферні установки, тепловентилятори. Для одержання локального мікроклімату при вирощуванні телят, поросят і молодняку птахів використовують допоміжний місцевий обігрів (інфрачервоні опромінювачі, теплу підлогу). Для зволоження та зниження температури повітря тваринницьких і птахівницьких приміщень використовують зволожувачі, що входять в склад вентиляційного обладнання або окреме обладнання зволоження.
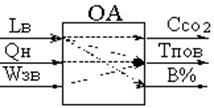
Рис. 2.2.1. Структурна схема об’єкта регулювання мікроклімату: вхідні дії – Lв – вентиляція; Qн– обігрів; Wзв – зволоження; вихідні дії – Ссо2 – концентрація СО2; Тпов – температура повітря в приміщенні; В% – вологість повітря в приміщенні
Особливі умови по створенню мікроклімату характерні для інкубаційного та післяінкубаційного періоду в птахівництві. Тваринницькі приміщення та пташники як об’єкт регулювання мікроклімату – це складні об’єкти, так як параметри мікроклімату тісно пов’язані між собою. Так, вентиляція впливає не лише на концентрацію газів СО2, NH3, H2S, але і на температуру Тпов та вологість В% повітря в приміщенні. Зволоження підвищує вологість В% та знижує температуру Тпов повітря в приміщення. Слід враховувати, що на вихідні параметри мікроклімату повітря в приміщенні впливають також значення температури, вологості зовнішнього середовища, кількість тепловиділень від тварин тощо.На рисунку 2.2.1 зображена структурна схема об’єкта регулювання мікроклімату. Враховуючи залежність регульованих параметрів мікроклімату, при керуванні опалювальним та вентиляційним обладнанням використовують: дво-, трипозиційні релейні регулятори температури з біметалевими, манометричними датчиками та терморезисторами, рідше безперервні та імпульсні регулятори температури. При керуванні зволоженням використовують двопозиційні регулятори вологості з гігроскопічними та гігристорними датчиками. Автоматизація систем мікроклімату дозволяє створити й підтримувати оптимальні умови повітряного середовища у тваринницьких і птахівницьких приміщеннях. В результаті застосування автоматизації підвищується продуктивність тварин, скорочуються витрати ручної праці і зменшується витрата електричної й теплової енергій. Розрахунки показують, що використання навіть найпростіших пристроїв підтримки температурних режимів дозволяє заощаджувати до 30% електроенергії. Визначальними параметрами, що характеризують стан внутрішнього повітряного середовища у тваринницьких і птахівничих приміщеннях і піддаються безпосередньому регулюванню, варто вважати температуру, швидкість руху, відносну вологість, і газовий склад повітря. Особливості автоматизації систем мікроклімату. При розробці автоматичних систем мікроклімату необхідно враховувати наступні особливості. 1. Складність автоматизації мікроклімату у тваринницьких і птахівничих приміщеннях обумовлена залежністю регульованих параметрів (температура, швидкість руху, відносна вологість повітря та ін.) від зовнішніх і внутрішніх факторів і їхнім взаємозв’язком; факторів які змінюються протягом доби і тим більше в різні періоди року. 2. Розосередженість у широких межах контрольованих і регульованих параметрів як за обсягом, так і за часом. 3. Безупинний технологічний зв’язок систем мікроклімату з живими організмами, для яких характерна безперервність біологічних процесів. 4. Роботу устаткування в приміщеннях із підвищеним вмістом вологи, пилу й агресивних газів. Система автоматичного регулювання (САР) повинна володіти мінімальною інерційністю, забезпечувати правильну послідовність роботи установок, бути надійною й стійкою у роботі, мати захист проти аварійних ситуацій, бути досить простою і економічно вигідною.
Питання для самоконтролю 1. Фактори, які впливають на мікроклімат в тваринницьких приміщеннях і пташниках. 2. Які параметри мікроклімату необхідно контролювати в тваринницьких і птахівницьких приміщеннях? 3. Які системи використовуються для підтримання мікроклімату в тваринницьких приміщеннях та пташниках? 4. Особливості автоматизації мікроклімату в тваринницьких приміщеннях та пташниках.
2.2.2. Автоматизація вентиляційних установок
Для підтримання відповідних значень температури, вологості, газового складу шляхом забезпечення потрібного повітрообміну застосовують різноманітні комплекти вентиляційного обладнання. За призначенням вентиляційні установки поділяють на припливні, витяжні та комбіновані. У витяжних системах, як правило, використовують осьові вентилятори. Типовим прикладом системи витяжної вентиляції є вентиляційне обладнання "Клімат-4";, яке залежно від виконання комплектується осьовими вентиляторами типу ВО різної кількості та продуктивності. На рисунку 2.2.2 зображено схему розташування вентиляційного обладнання "Клімат-4";.
Рис. 2.2.2. Вентиляційне обладнання “Клімат-4”: а) – схема розташування; б) – функціонально-технологічна схема; 1 – вентилятор осьовий; 2 – автоматичні вимикачі; 3 – перемикач; 4 – щит керування; 5 – датчик температури
Станція керування вентиляцією ШАП-5701 забезпечує: · східчасте регулювання швидкості обертання електродвигунів пропелерних вентиляторів вниз від номінальної в діапазоні 1500...250 хв–1; · регулювання швидкості обертання у функції температури повітря в приміщенні; · автоматичний перехід на нижчу швидкість при зниженні температури повітря в приміщенні; · автоматичний перехід на вищу швидкість при підвищенні температури повітря в приміщенні; · автоматичний вибір кількості працюючих груп електродвигунів вентиляторів; · автоматичне відключення однієї групи електродвигунів при зниженні температури повітря в приміщенні; · автоматичне включення додаткової групи електродвигунів при підвищенні температури повітря в приміщенні; · можливість встановлення температури повітря в приміщенні в діапазоні від 5 до 35 °С або в діапазоні від 0 до 40 °С; · контроль напруги, яка подається на електродвигуни; · ручне включення, переключення і відключення електродвигунів; · світлову сигналізацію швидкості працюючих електровентиляторів і наявності напруги на станції керування; · захист від коротких замикань і перевантаження. Згідно з функціонально-технологічною схемою система автоматизації передбачає автоматичне керування вентиляційною установкою за температурою повітря в приміщенні, яка контролюється датчиком температури ТЕ. Залежно від температури повітря терморегулятором ТС формується сигнал керування електродвигунами вентиляторів. За допомогою перемикача HS задається режим керування електродвигунами вентиляторів. Ручне керування виконується апаратом ручної дії H. Осьові вентилятори типу ВО приводяться в дію спеціальними асинхронними двигунами з підвищеним ковзанням. Командними пристроями станції керування є трипозиційний регулятор температури ПТР-3, а безпосереднє регулювання напруги живлення електродвигунів виконується автотрансформаторами. Комплект “Климат-4М” здійснює витяжну вентиляцію. Він поставляється у двох варіантах – “Климат-45М” і “Климат-47М”, які відрізняються між собою за типом і кількістю вентиляторів. До складу комплекту входять: група електровентиляторів типу ВО-5,6МУЗ (комплект “Климат-45М”) або ВО-7,1МУЗ (комплект “Климат-47М”), шафа керування ШОА9203-3474УХЛЗ або пристрій керування комплектний “Климатика-1” типу ТСУ-2-КЛУЗ з чотирма термоперетворювачами та ін. Шафа керування ШОА9203-3474УХЛЗ випускається на заміну станції керування ШАП5701-ОЗА2Д і призначена для автоматичного і ручного керування електровентиляторами серії ВО обладнання “Климат-4М”. Вона забезпечує: · ступінчасте регулювання частоти обертання електродвигунів осьових вентиляторів вниз від номінальної в діапазоні 1: 6; · дистанційне вмикання системи опалення при низькій температурі зовнішнього повітря і повітря в приміщенні; · можливість задавання температури повітря в приміщенні в діапазоні О...+40 °С; · можливість задавання фіксованого значення температури зовнішнього повітря в діапазоні –50 °С......+50 °С; · ручне вмикання, перемикання і вимикання двигунів; · світлову сигналізацію ступенів частоти обертання двигунів, наявності напруги на шафі керування та ввімкненого стану системи опалення; · захист від коротких замикань і перевантаження електродвигунів вентиляторів. Шафа розрахована на роботу в електромережі трифазного змінного струму частотою 50 Гц. Номінальна напруга силового кола 380 В і кола керування 220 В. Напруги для 1, 2, 3, 4, 5 і 6 ступенів частоти обертання двигунів вентиляторів становлять 70, 90, 110, 160, 220 і 380 В. Номінальний струм силового кола 25 А. Шафа керування ШОА9203-3474УХЛЗ складається з металевої оболонки з ступенем захисту від дії оточуючого середовища ІР54, в якій встановлено: ввідний автоматичний вимикач АП50Б-ЗМТУЗ, шість електромагнітних пускачів ПМЛ210004 з приставками ПКЛ2204, три проміжних реле РПУ-0-561УХЛ4, два мікроелектронних терморегулятори-сигналізатори МЄТРС-3, автотрансформатор АТ-10, тумблер ТВ1-2В, восьмипозиційний перемикач 8П1Н2, сигнальна арматура АСЛ12У2 та цифровий індикатор ИН18. Шафа поставляється у складеному стані разом з блоками датчиків. Датчиками служать термоперетворювачі ТСМ-6114 (термометр опору мідний). Принципова електрична схема станції керування ШОА-9203 комплекту вентиляційного обладнання “Клімат-4М” показана на рисунку 2.2.3.
Рис. 2.2.3.а. Електрична схема силових кіл вентиляційної установки “Клімат-4М”
Рис. 2.2.3.б. Електрична схема кіл керування вентиляційною установкою “Клімат-4М” Для автоматичного керування вентиляційною установкою тумблер SА1 встановлюють в положення А (автоматичний режим роботи). При цьому подається живлення на терморегулятори А1 і А2. Ручку задатчика терморегулятора A1 встановлюють на фіксоване значення температури зовнішнього повітря, яке контролюється за допомогою термоперетворювача ВК1, встановленого зовні приміщення. На задатчику терморегулятора А2 встановлюють значення температури повітря в приміщенні, яке необхідно підтримувати. Температура повітря в приміщенні контролюється термоперетворювачами ВК2.....ВК5, які встановлені в контрольних точках приміщення і визначають її інтегроване за чотирма точками значення. При температурі зовнішнього повітря нижче фіксованого значення на величину, більшу від зони нечутливості терморегулятор А1, замкнеться його замикаючий А1.1 і розімкнеться розмикаючий А1.2 контакти. Замиканням контакту А1.1 підготується до роботи коло котушки електромагнітного пускача КМ1, а розмиканням контакту А1.2 усунеться можливість одночасного замикання кіл котушок електромагнітних пускачів КМ1 і КМ.3. Якщо в цей час температура повітря в приміщенні нижча заданої на величину, більшу від зони нечутливості терморегулятора А2, то його замикаючий контакт А2.1 також замкнеться, а розмикаючий контакт А2.2 розімкнеться. Замиканням контакту А2.1 буде подано живлення на котушку проміжного реле КV1, а розмиканням контакту А2.2 усувається можливість одночасного вмикання проміжних реле КV1 і КV2.
|