Судовые компрессоры.
Компрессоры являются нагнетателями, обеспечивающими различные судовые нужды сжатым воздухом или газом. Они осуществляют аккумулирование энергии в форме сжатого воздуха или газа. По принципу действия компрессоры можно разделить на три типа: центробежные, поршневые и осевые. Механизмы центробежного и осевого типа используются в тех случаях, когда необходимо создать большую подачу при небольших давлениях. Механизмы поршневых насосов позволяют осуществить сжатие газов до больших давлений, они и получили на судах наибольшее распространение. По конструкции механической части поршневые компрессоры бывают: - с вертикальным или горизонтальным расположением вала; - простого и двойного действия,
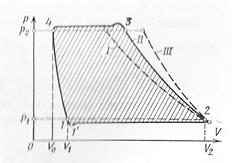
Различают теоретические и действительные диаграммы. Теоретически при движении поршня от верхней мертвой точки газ поступает в цилиндр при давлении р1, что характеризуется прямой р1-2. При движении в обратном направлении закрывается приемный клапан и начинается сжатие: без отвода тепла – адиабатический процесс (кривая III); с интенсивным охлаждением, теоретически при постоянной температуре,– изотермический процесс (кривая I); при частичном охлаждении – политропический процесс (кривая II). При достижении давления р2 открывается нагнетательный клапан и воздух переходит в ресивер, служащий аккумулятором воздуха (прямая 3-р2). Площадь диаграммы представляет собой теоретическую работу сжатия воздуха в течение цикла:
Действительная диаграмма значительно отличается от теоретической. При нахождении поршня в верхней мертвой точке остается вредное пространство объемом V0 с давлением воздуха р2. Поэтому на участке 4-1 при перемещении поршня происходит расширение воздуха до давления р1. В точке 1' открывается всасывающий клапан и до точки 2 происходит всасывание при давлении несколько меньшем р1 из-за сопротивления клапана. При сжатии давление изменяется по кривой II. Выталкивание сжатого воздуха происходит при давлении, несколько большем р2, что обусловлено сопротивлением движению воздуха через нагнетательный клапан. Площадь действительной индикаторной диаграммы (заштрихована) будет меньше теоретической. Она характеризует работу Аи, совершаемую компрессором за цикл. Среднее давление за цикл может быть определено по выражению:
где VP=V2-V1 – объем воздуха, всасываемого за цикл при давлении р1. Средняя подача компрессора определяется аналогично поршневым насосам по выражению:
Средняя за цикл мощность одноступенчатого компрессора определится выражением:
Для m-ступенчатого компрессора индикаторная диаграмма оказывается составленной из m частей, соответствующих всем ступеням. Мощность компрессора в этом случае определяется по тому же выражению, однако значения ри и Аи берутся по результирующей индикаторной диаграмме. Для отвода тепла работающего компрессора необходимо большое количество охлаждающей жидкости, которая поступает от магистрального или собственного насоса. Для привода компрессоров используются ДПТ со смешанным возбуждением или асинхронные двигатели с повышенным моментом, что обуславливается тяжелыми условиями пуска благодаря наличию противодавления в системе и маховика на валу, используемого для уменьшения колебания тока, возникающего от пульсирующей нагрузки.
6. Системы управления. Режим работы вспомогательных механизмов определяется режимом работы установки или системы, для которой предназначены механизмы. Электроприводы насосов и вентиляторов в основном работают в длительном режиме с неизменной нагрузкой. Небольшая часть насосов общесудового назначения работает эпизодически, в кратковременном режиме. К ним относятся санитарные насосы и насосы пресной воды, обслуживающие гидрофоры, топливо- и маслоперекачивающие насосы, пополняющие расходные цистерны. Судовые насосы, вентиляторы, компрессоры и др. включаются сравнительно редко, не требуют реверса, специальных способов торможения и обычно работают без регулирования скорости. Это упрощает схемы управления, сводя их к пуску, остановке и защите электродвигателей. На функциональные особенности схем управления влияет также принятый на судне уровень автоматизации. При постоянной вахте в машинном отделении имеет место первый уровень автоматизации. На данном уровне осуществляется управление, контроль, защита и сигнализация с местных постов управления, располагаемых вблизи механизма или непосредственно на нем. В этом случае для включения и отключения большинства насосов и вентиляторов, работающих на постоянном токе, применяют пусковые реостаты, а работающих на переменном токе – магнитные пускатели. По правилам Российского Речного Регистра некоторые ЭП должны иметь устройства для дистанционного отключения. К ним относятся электроприводы топливо- и масло перекачивающих насосов, котельных нагнетателей, сепараторов. Посты дистанционного отключения должны находиться вне помещений этих насосов и шахт, но вблизи них, а также в рулевой рубке, а на судах длиной менее 25м – в рулевой рубке. Пожарные насосы должны иметь местное и дистанционное управление. В цепях питании ЭП пожарных насосов не должны применяться устройства защиты от перегрузки, работающие по принципу термореле. Устройства защиты от перегрузки допускается заменять сигнализацией. ЭП вентиляторов машинного помещения, грузовых трюмов, камбузов и общесудовой вентиляции должны иметь дистанционное отключающее устройство, расположенное в рулевой рубке. Устройства дистанционного отключения вентиляторов должны иметь световую сигнализацию о включении и об остановке ЭП. Приточная и вытяжная вентиляция помещений с объемным пожаротушением должна выключаться во время пуска системы. Аварийные кнопки и выключатели окрашивают в красный цвет. Дистанционное управление по схемам релейно-контакторного типа позволяет производить автоматический пуск и остановку ЭД в функции давления, уровня, температуры и других параметров. При первом уровне автоматизации автоматическое управление широко применяют для ЭП: санитарных насосов; насосов пресной воды, питающих гидрофоры; насосов, пополняющие различные расходные цистерны; компрессоров пускового воздуха; компрессоров и насосов холодильных установок и др. Наиболее просто осуществляется автоматизация центробежных нагнетателей, поскольку пуск их при закрытой задвижке не опасен. Сложнее обстоит дело при автоматизации поршневых насосов, т.к. недопустим их пуск при закрытой задвижке. Приходится применять усложненную схему управления, блокировки, делать задвижки с электрическим или пневматическим приводом и т.д. При постоянной вахте в центральном посту управления и периодическом обслуживании машинных помещений имеет место второй уровень автоматизации (знак А2). В этом случае обеспечивается автоматическое управление по заданным программам совокупностью отдельных механизмов и контроль за их работой. Кроме того, в ЦПУ предусматривается управление рядом ответственных систем. Для повышения надежности работы важных систем предусматривается резервирование. При отсутствии постоянной вахты в ЦПУ и машинных помещениях имеет место третий уровень автоматизации (знак А1). В этом случае с помощью управляющего комплекса обеспечивается управление системами по заданным программам, а так же корректировка режимов работы системами без участия обслуживающего персонала. Более надежная работа механизмов достигается повышенным контролем их состояния по увеличенному числу параметров. Для второго и третьего уровня автоматизации после исчезновения и последующего восстановления напряжения судовой электростанции находящиеся в работе ЭП должны автоматически вводиться в действие по специальной временной программе в порядке важности ЭП. Такая автоматизированная система управления ЭП получила название «Стенд бай».
Глава 2. Рулевые электроприводы. 1. Назначение и классификация рулевых приводов. Под рулевым приводом принято понимать механизм для передачи движения к рулю. Рулевые приводы можно разделить по ряду признаков. По назначению привод может быть основным, запасным и аварийным. В зависимости от рода используемой энергии различают ручной и электрифицированный привод. По принципу управления электрифицированные приводы разделяют на три типа: - простого дистанционного действия, осуществляемого посредством кнопок, педалей или рычагов, положение которых не соответствует положению пера руля; - следящего действия, осуществляемого с помощью рычагов и штурвала, положение которых строго соответствует положению пера руля; - автоматического действия, выполняющие автоматическую стабилизацию судна на курсе, автоматический переход на новый курс и программное управление курсом по наперед заданному закону. Автоматические системы имеют резервное управление простого и следящего типов. По типу передаточного механизма привод можно разделить на две группы: - с механической передачей – РЭМ приводы; - с гидравлической передачей – РЭГ приводы. Рулевые приводы с механической передачей бывают штуртросовые, валиковые, винтовые и секторные.
Штуртросовые Валиковые Винтовые
Рассмотрим принцип действия и устройство секторной рулевой машины.
Баллер – вертикальный вал, закрепленный в подшипниках. Снизу к нему крепится перо руля, сверху свободно надевается сектор и жестко, шпонками, крепится румпель. Усилия от сектора к румпелю передается при помощи демпферных пружин, предназначенных для компенсации ударной нагрузки. Между ЭД и сектором стоит редуктор, представленный на чертеже червячной парой и цилиндрической шестерней, находящейся в зацеплении с сектором. Червячная пара – обязательный элемент редуктора, так как с его помощью легче и проще всего сделать передачу самотормозящейся, что требует Регистр. Передача становится самотормозящейся при КПД h < 0,5 (обратный момент не передается), поэтому общий КПД секторных машин hмех = 0,36 ÷ 0,4. Секторные рулевые машины подразделяются на пять типов: 1 тип – машины одинарные «морские» с одним электродвигателем и червячным редуктором основного привода. Запасный привод автономный, действует на баллер руля независимо от основного, выполнен отдельно. 2 тип – машины одинарные «речные» с одним электродвигателем основного привода, одним ЭД запасного привода и дифференциальным редуктором Федорицкого, состоящего из двух червячных передач и конических шестеренок. Основной ЭД подсоединен к одному червяку, запасный, через дополнительный редуктор, ко второму червяку. Червячные колеса выполнены заодно с коническими шестернями, которые передают усилие на баллер через сателлиты. При работе одного двигателя, второй заторможен. 3 тип – машины одинарный «морские» с двумя электродвигателями и червячным редуктором основного привода. Запасный привод не предусматривается. 4 тип – тоже «речные». Машины 1-4 типов предназначены для обслуживания одного и двух рулей. 5 тип – машины сдвоенные «речные», состоящие из двух одинарных машин 2 типа, у которых ЭД основного привода имеют два выходных конца вала: один подсоединен к хвостовику червяка редуктора, а другие концы, обращенные к диаметральной плоскости, соединены между собой при помощи электромагнитной муфты, допускающей раздельную работу одинарных рулевых машин. Рулевые электрические приводы с гидравлической передачей (РЭГ - приводы) классифицируются по целому ряду признаков: По типу гидропривода бывают: плунжерные, лопастные, с качающимися цилиндрами, реечно-плунжерные и т.д. По типу насосов – с насосами переменной подачи и с насосами постоянной подачи; По типу сервоприводов – постоянного, переменного тока, электромагнитный привод; По типу дифференциалов кинематики сервопривода – рычажные, кулачковые, электрические и т.д. Рассмотрим принципиальную схему, состав и работу плунжерного гидропривода, где:
Плунжерные гидроприводы могут быть в зависимости от момента на баллере с одной или двумя парами цилиндров. При четырех цилиндрах вторая пара располагается с другой стороны баллера, симметрично. Цилиндры могут располагаться параллельно и перпендикулярно диаметральной плоскости судна. Плунжерные гидравлические машины выполняются одно- и двухрулевые. У рассматриваемой двухцилиндровой плунжерной рулевой машины цилиндры 1 установлены на фундаменте в направляющей 7. Выходы цилиндров 1 имеют уплотнения (кожаные или из маслостойкой резины). В месте утолщения плунжерной пары установлена поворотная муфта 5 свободно вращающаяся вокруг вертикальной оси на цапфах. В муфту входит цилиндрический хвостовик румпеля 4. При перемещении плунжеров происходит поворот баллера руля, сопровождающийся скольжением хвостовика румпеля в муфте, а также поворотом муфты. Боковые усилия, возникающие в плунжерной паре, через ползуны 6 воспринимаются направляющей 7. Перекладка пера руля (поворот румпеля) происходит за счет избыточного давления в одном из цилиндров, которое создается насосом переменной подачи 12, перекачивающим масло из одного цилиндра в другой. Величина давления в цилиндрах определяется моментом сопротивления на баллере. При динамических нагрузках и возникновении давления выше допустимого срабатывает предохранительный клапан 8 и перепускает масло во всасывающую полость. Главная клапанная коробка 11 автоматически подключает работающий насос (их может быть два – основной и резервный, или основной и запасный, может быть три – два основных и один запасный). У четырехцилиндровых машин она позволяет отсечь неисправные два любых цилиндра и осуществлять работу на оставшихся цилиндрах. Насос постоянной подачи 13, дроссельный клапан 10 и клапанная коробка 9 создают подпор p = 0,3 ÷ 0,5 МПа для исключения подсасывания воздуха, при провале давления во всасывающем трубопроводе. В некоторых установках вместо них устанавливается подпорный бак. В приводе используется главным образом управление следящего действия. Рассмотрим его работу на примере ручного управления с рычажным дифференциалом. Так при повороте рычага управления 16 влево нижний конец рычага 17 переместится в точку b, конец манипулятора насоса 12 переместится в точку d. Возникает эксцентриситет, и масло из правого цилиндра будет перекачиваться в левый, плунжер будет перемещаться вправо до тех пор, пока конец манипулятора не вернется в точку c и насос будет работать с нулевой подачей. Полный эксцентриситет возникает обычно при задании 50; больший угол перекладки пера руля воспринимается пружиной e - f. Отечественной промышленностью выпускаются плунжерные гидравлические машины типов Р11 – Р20 с одним или двумя маслеными насосами регулируемой подачи с электроприводом. Указанные машины способны развивать момент на баллере 63 – 1000 кН•м.
2. Требования Правил Российского Речного Регистра к рулевому устройству.
1) Общие указания – рулевым устройством должны быть оборудованы все самоходные суда; – рулевой привод должен обеспечивать непрерывное управление судном в условиях эксплуатации, в том числе при отказе основного привода или отключении основного источника питания; – перо руля и поворотная насадка не должны выступать за габариты судна; – расположение руля и поворотной насадки должно исключать их повреждение от удара о грунт, при плавании судна с небольшим расчетным дифферентом на корму. 2). Комплектация рулевых устройств рулевыми приводами. – рулевое устройство судна должно иметь два привода: основной и запасный. Запасный привод не требуется на судах с несколькими рулями или насадками, приводимыми в действие раздельно управляемыми машинами; – основной и запасный рулевые приводы должны быть устроены так, чтобы повреждение одного из них не выводило из строя другой. Допускается при этом иметь общие детали силового привода на баллер (румпель, сектор, цилиндровый блок); – система управления основным рулевым приводом должна быть независимой от системы управления запасным рулевым приводом. Допускается иметь общий штурвал или рукоятку управления; – запасный рулевой привод должен обеспечивать перекладку руля или поворотной насадки на тот же максимальный угол, что и основной; – посты управления основным и запасным рулевыми приводами должны быть оборудованы указателями положения руля (поворотной насадки). 3) Рулевые приводы: – рулевые приводы должны обеспечивать непрерывную работу при постоянном крене до 150 и дифференте до 50. Двигатели рулевых приводов должны допускать перегрузку по моменту, равному 1,5 расчетного крутящего момента в течение 1 минуты; – мощность основного рулевого привода должна быть достаточной для перекладки руля на угол от 350 одного борта до 350 другого борта за время не более 30 секунд при максимальной скорости переднего хода судна и осадки по грузовую ватерлинию; – мощность запасного механическогорулевого привода должна быть достаточной для перекладки руля на угол от 200 одного борта до 200 другого борта за время не более 60 секунд при скорости переднего хода 0,6 наибольшей и осадке его по грузовую ватерлинию; – рулевой привод должен быть самотормозящейся конструкцией; – если основной и запасный привод гидравлические, то каждый из этих приводов должен иметь насос с независимым двигателем, а трубопроводы приводов должны быть проложены как можно дальше друг от друга. 4) Электрический привод руля. 4.1 Электрический привод рулевого устройства должен обеспечивать: – перекладку с борта на борт за время и угол, как указано выше; – непрерывную перекладку руля с борта на борт в течение 30 минут для каждого агрегата при полностью погруженном руле и максимальной скорости переднего хода; – возможность стоянки электродвигателя под током в течение 1 минуты с нагретого состояния (только для рулей с непосредственным электрическим приводом); – начальный пусковой момент двигателя рулевого устройства с непосредственным электрическим приводом должен быть не менее 200 % номинального; – при ходе судна по курсу не менее 350 включений в час при перекладке руля на 5 – 6 градусов, наибольшей эксплуатационной скорости переднего хода и непрерывной работе в течение 1 часа. 4.2. В схеме управления рулевого электрического привода должны быть предусмотрены конечные выключатели, ограничивающие перекладку руля или насадки на левый и правый борт. При срабатывании одного из них должна обеспечиваться возможность перекладки руля в обратном направлении. 4.3 Пусковые устройства должны обеспечивать повторный автоматический запуск ЭД при восстановлении напряжения после перерыва в подаче питания. 4.4. Для ЭД электрического или электрогидравлического рулевого устройства должно предусматриваться устройство защиты только от токов короткого замыкания. Защита от минимального напряжения и перегрузки не допускаются. Вместо защиты от перегрузки должна быть установлена сигнализация. 4.5 Автоматические выключатели, защищающие электрические двигатели постоянного тока рулевых устройств от токов короткого замыкания, должны иметь уставки на мгновенное выключение при токе не менее 300 % и не более 400 % номинального тока защищаемого электрического двигателя, а для двигателей переменного тока – уставки на мгновенное выключение при токе более 125 % наибольшего пускового тока защищаемого двигателя. 4.6 У постов управления главными механизмами (при их наличии) и в рулевой рубке у поста управления рулем или в самом пульте управления должны быть устройства, сигнализирующие о наличии напряжения в цепи питания рулевого устройства, его перегрузке и отключении, а для гидравлических систем – по минимальному уровню масла в расходной цистерне.. Сигнал о перегрузке и отключении должен быть световым и звуковым. 5) Питание электрических приводов рулевых устройств. – основной и запасный рулевые приводы должны получать питание по отдельным фидерам; – каждый фидер должен быть рассчитан на питание всех электродвигателей, которые подключены к нему и работают одновременно; – если аварийный источник электрической энергии имеет одинаковые напряжение и род тока с основным источником энергии, то один фидер идет от ГРЩ, второй от АРЩ. Фидеры прокладываются по разным бортам; – аварийный источник электрической энергии должен обеспечить питание в течение не менее 6 часов пассажирских и грузопассажирских судов класса «М», не менее 3 часов судов класса «О», «Р», «Л»; – время перехода с основного источника питания на аварийное должно составлять не более 15 секунд.
|