
Рули и поворотные насадки.
3.1. Классификация рулей и поворотных насадок
Рули бывают активные и пассивные. Активные рули обеспечивают управляемость судна без хода и на малых скоростях, когда обычные рули не эффективны. В их качестве могут применяться: – перьевые рули с встроенными винтами и электродвигателями; – крыльчатые движители; – поворотные колонки; – поворотные насадки с раздельным управлением; – подруливающие устройства. Пассивные рули обеспечивают управляемость судна на ходу. К ним относятся перьевые рули и поворотные насадки при совместном управлении. Перьевые рули. По конструкции различают: – плоские (пластинчатые); – обтекаемые. В плане (вид сверху)
Пластинчатые(плоские) Обтекаемые
По количеству опор рули бывают подвесные, одноопорные и многоопорные.
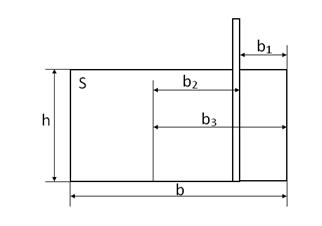
По форме контура пера руля различают прямоугольные и произвольной формы, часто повторяющие очертания кормовой оконечности судна. По расположению оси вращения рули подразделяются на: – простые; – полубалансирные; – балансирные. Рассмотрим на примере плоских рулей прямоугольной формы:
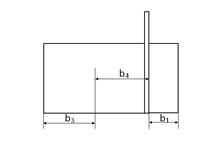
Введем обозначения: S – площадь пера руля; S1 – площадь выступающей части пера руля; h – высота пера руля; h1 – высота выступающей (балансирной) части пера руля; b – ширина пера руля – расстояние от набегающей кромки до кормовой оконечности пера руля; b1 – ширина балансирной части руля – расстояние от набегающей кромки до оси вращения. Простой руль. Для упрощения расчетов считают, что набегающая кромка пера руля совпадает с осью вращения. Полубалансирный руль, когда высота выступающей (балансирной) части не равна высоте пера руля: h > h1 Балансирный руль, когда высота балансирной части равна высоте руля. Балансирный и полубалансирные рули характеризуются коэффициентом компенсации, под которым понимают отношение площади выступающей части к полной площади пера руля:
Для балансирных рулей:
Число рулей на судне может быть 1, 2, 3, 4 и т.д. Они устанавливаются как за винтами, так и между ними. Наиболее эффективны рули при установке за винтами.
Поворотные направляющие насадки. По конструкции различают: – насадки без стабилизатора; – с неподвижным стабилизатором; – с управляемым стабилизатором. По числу опор бывают насадки подвесные и насадки с одной опорой на пятке. По длине окружности охвата винта насадки бывают полные и неполные. Полная направляющая насадка представляет собой кольцевое крыло, имеющее в продольном сечении форму аэродинамического профиля и охватывающее с минимальным зазором гребной винт. Из опыта проектирования и эксплуатации установлены оптимальные размеры: Дн ≤ 1,02 Дв; lн = (0,7 ÷ 0,9) Дв Поворотные насадки характеризуются коэффициентом раствора αн и коэффициентом расширения βн.
Особенность действия насадки, по сравнению с простым рулем, возникновение гидродинамических сил, стремящихся повернуть насадку на больший угол по отношению к набегающему потоку. Для компенсации вращающего момента этих сил устанавливается стабилизатор, высота стабилизатора hСТ = ДВЫХ, длина lСТ = 0,6 ДН (при увеличении длины стабилизатора возрастает момент заднего хода МЗ.Х. на баллере, при уменьшении – ухудшается устойчивость судна на курсе). Применение поворотных насадок (ПН) улучшает условия работы двигателя: – повышается КПД, так как увеличивается площадь сечения струи винта при прочих равных условиях(частота вращения, упор). Так у буксиров поворотные насадки увеличивают тягу на гаке на 50 % на швартовах, на 20 – 30 % при ходе с составом и может увеличиться скорость порожнем; – улучшаются условия работы винта при волнении из-за демпфирующего свойства ПН; – уменьшается качка судна и уменьшаются перепады нагрузки на главных двигателях. На быстроходных судах ПН не применяют из-за повышенного лобового сопротивления.
3.2. Действие потока воды на перо руля. Поворачивающий судно момент.
При прямолинейном движении судна и отклонении руля от диаметральной плоскости (ДП) на угол α (будем считать равным углу атаки, то есть углу, под которым поток набегает на плоскость пера руля) на пере руля под действием набегающего потока воды возникают силы давления. Поле сил давление может быть представлено равнодействующей силой Р, нормальная составляющая которой Рn направлена перпендикулярно продольной оси пера руля.
Разложим Рn на составляющие: Р2 = Pn • sinα – продольная составляющая, лежащая практически в диаметральной плоскости. Может быть перенесена в центр тяжести судна. Отсюда видно, что она оказывает дополнительное сопротивление движению судна. Р1 = Pn • cosα – поперечная составляющая. Поместим в центр тяжести судна взаимно уравновешивающиеся силы Р′ и Р″, равные и параллельные силе Р1. Силы Р1 и Р′ составляют пару сил, плечо которой можно считать приблизительно равным половине длины судна L. Они образуют момент, поворачивающий судно в сторону перекладки руля.
Сила Р″ называется силой дрейфа. Она сносит судно боком во внешнюю сторону описываемой им дуги и создает, из-за наличия метацентрической высоты, крен судна. Установлено, что нормальная составляющая Рn пропорциональна площади пера руля, квадрату скорости потока воды из под винтов (скорости движения судна) и sinα.
где: S – площадь пера руля, м2; V – скорость судна, м/с; k – коэффициент пропорциональности, зависящий от угла перекладки, от обводов корпуса судна, глубины акватории. Для различных типов рулей значения коэффициента k устанавливаются экспериментально и задаются в виде графиков и таблиц. Для прямоугольных плоских рулей проф. Полонский предложил аналитическое выражение для коэффициента k:
В общем виде:
Это выражение имеет максимум при 0 < α < 900. Если взять производную по углу α и приравнять к нулю, то получим:
При решении найдем, что максимальный момент будет при α = 35,90. Следовательно, для эффективного поворота судна прикладывать руль на больший угол нет необходимости. Отсюда и требования Регистра – перекладка руля от 350 одного борта до 350 другого за время менее 30 с.
3.3 Статический момент на баллере руля.
Нормальная составляющая силы, действующей на перо руля, создает статический момент на баллере, который определяет мощность исполнительного двигателя привода. Зависимость статического момента на баллере от угла перекладки руля Мб = f (α) называется нагрузочной характеристикой рулевого механизма. Рассмотрим особенности расчета нагрузочных характеристик для некоторых типов рулей. 1) Простой пластинчатый руль прямоугольной формы.
При известном значении нормальной составляющей равнодействующей сил давления на перо руля для определения момента необходимо знать плечо силы – расстояние от точки приложения равнодействующей сил до оси вращения – b2 (в теории рулей). Профессор Полонский предложил аналитическое выражение для определения положения центра приложения силы относительно набегающей кромки пластинчатого руля прямоугольной формы – b3:
Для простого руля можно считать, что b3 ≈ b2. Тогда момент на баллере простого прямоугольного руля определится выражением:
Максимальное значение Мб будет при α = 900, следовательно, без необходимости не следует делать угол поворота α > 350. 2) Балансирный пластинчатый руль прямоугольной формы.
Для этих рулей плечо силы определяется выражением:
Момент на баллере:
Проанализируем поведение Mб в зависимости от коэффициента компенсации
1. При 2. При
Из этого выражения видно, что с увеличением балансирной части b1 угол α, будет увеличиваться. При значении
Зависимость Мб = f (α) может быть построена на основании полученных формул в виде графика:
При положении пера в ДП угол α = 0. Углы того борта, от которого движется перо руля к ДП, считаются отрицательными; в сторону которого движутся от ДП – положительными. Моменты, противодействующие перекладки, считаются положительными, действующие в направлении перекладки – отрицательными. На графике: 1 – простой руль; 2 – балансирный руль; 3 - Из графика следует, что чем больше коэффициент компенсации
3) Пластинчатые рули произвольной формы.
Для определения момента на баллере площадь пера руля разбивают на тонкие пластины одинаковой высотой ∆h, которые считают прямоугольными, и для каждой пластины рассчитывают момент по выше приведенным формулам:
где: bk1 – ширина балансирной части k-ой пластины; bk – ширина k-ой пластины. Момент на баллере:
При этом, если bk1 находится справа, то берется со знаком (+), если слева – со знаком (-). Для определения угла устойчивого положения пера руля квадратную скобку приравнивают к нулю:
4) Рули обтекаемой формы. Наилучшими характеристиками обладают рули: типа НЕЖ, полученные построением профиля по формуле Жуковского, применяются для быстроходных судов;
типа NASA, предложенные американской аэродинамической лабораторией (NASА – Национальный консультативный комитет по аэронавтике США): применяются при средних скоростях при расположении рулей за винтами;
типа ЦАГИ, (Центрального аэродинамического института): применяются для рулей расположенных в диаметральной плоскости при двух винтах.
Профили характеризуются: - относительным удлинением - относительной толщиной профиля где: б – максимальная толщина профиля; b – ширина руля. В результате аэродинамической продувки и испытаний на моделях для каждого профиля при определенных значениях Значение величин рассчитывают по формулам:
где S – площадь руля, м2; V – скорость судна, м/с.
3.4. Момент на баллере при движении судна задним ходом.
При движении задним ходом набегающей будет задняя кромка пера руля, тогда для пластинчатого руля прямоугольной формы расстояние от центра приложения равнодействующей силы до оси вращения балансирного руля (b4) определяется выражением:
Момент на баллере определяется выражением:
Оценим квадратную скобку:
Следовательно, максимальное значение на заднем ходу может быть значительно больше максимального момента на переднем ходу, хотя скорость судна, при движении задним ходом, составляет Vзх = 0,6V переднего хода. Графическая зависимость Мбзх = f(α) для всех рулей имеет примерно одинаковый вид.
3.5.Циркуляция судна. Опорный момент.
При движении судна по окружности (при циркуляции судна) различают диаметр тактической циркуляции (Дцт) и диаметр истинной циркуляции (Дци). Диаметр тактической циркуляции Дцт – это расстояние от начального положения судна до положения его после поворота на 1800. Диаметр истинной циркуляции Дци – это диаметр окружности, которую описывает судно при установившемся движении. Управляемость судна принято оценивать устойчивостью на курсе и поворотливостью судна. Поворотливость судна характеризуется диаметром тактической циркуляции: отлично – Дцт ≤ 1,2 L, хорошо – Дцт ≤ 2,4 L, неудовлетворительно – Дцт ≥ 4 L. Диаметр тактической циркуляции связан с размерениями судна и площадью пера руля отношением:
Отсюда, задаваясь значением диаметра тактической циркуляции, можно определить необходимую общую площадь рулей. При циркуляции под действием силы дрейфа судно разворачивается во внешнюю сторону от центра вращения и между касательной, проведенной через центр тяжести, к окружности вращения и диаметральной плоскостью судна возникнет угол дрейфа β. Угол атаки руля γ = α – β – уменьшается, поэтому на некоторых судах максимальный угол поворота руля составляет 450 или 600. При выходе из циркуляции и перекладке руля на максимальный угол противоположного борта угол атаки γ = α + β, при этом на баллере возникает момент пропорциональный sinγ, который значительно больше максимального момента переднего хода, и называется опорным моментом или критическим. В литературе приводится зависимость
4. Проектирование РЭМ – приводов.
В задании на проектирование должны быть указаны главные размерения судна, источники электроэнергии, род тока и напряжения, нагрузочная характеристика рулевого механизма – Мб = f (α). Проектирование производится в следующей последовательности: – рассчитывается (если не задана) и строится нагрузочная диаграмма рулевого механизма Мб = f (α); – выбирается тип электропривода; – рассчитывается и строится нагрузочная диаграмма рулевого электропривода М=f(α); – производится предварительный расчет мощности и выбор исполнительного электродвигателя; – рассчитываются и строятся естественная и реостатные механические характеристики выбранного исполнительного электродвигателя; – производится проверка выбранного ЭД: а) на перегрузочную способность; б) на нагрев; в) на выполнение требований Регистра; – проектируется схема управления; – производится выбор аппаратов управления, защиты и сигнализации; – составляется спецификация.
4.1 Нагрузочные диаграммы электромеханических рулевых приводов.
Имея зависимость Мб = f (α) для расчета и построения нагрузочной диаграммы рулевого электропривода поступают следующим образом: 1) методом линейно-кусочной аппроксимации упрощают зависимость Мб = f(α), заменяя отдельные криволинейные участки прямыми линиями или равновеликими трапециями с сохранением граничных углов перекладки и предельных значений моментов. При этом учитывается, что в электромеханических приводах применяют самотормозящиеся передачи с η=0,37-0,40, при котором моменты со стороны руля на электродвигатель не передаются, следовательно, на участках с отрицательными значениями моментов нужно принять Мб=0. 2)Определяют передаточное число и КПД передачи.
Наиболее целесообразными являются частоты вращения в пределах (600 - 1000) об/мин. Это обусловлено тем, что ЭД в РЭМ – приводах работают при частых пусках и торможениях. Чем выше частота вращения, тем больше энергии необходимо затратить при разгоне, тем больше запасенной кинетической энергии необходимо погасить при торможении. И хотя весогабаритные показатели тихоходных электродвигателей хуже, применение их в данном приводе более экономично и целесообразно. Угловая скорость баллера где αмах = 0,61 рад (350) – угол перекладки руля для основного привода. Определяется Регистром; T = 30 с – нормативное время перекладки руля с борта на борт; t0 = (2-3) с – запас времени на разгон и торможение. Общий КПД секторной рулевой машины слагается из КПД всех звеньев механизма и обычно составляет hмех = 0,37÷0,45. 3) Рассчитывают значение граничных моментов на валу ЭД по аппроксимированной характеристике Мб = f (α)
При Мб = 0 на валу электродвигателя будет момент М0, обусловленной большими потерями на трение. На основании практических данных для простых рулей М0 = (0,1÷0,15) Ммах. Строят диаграммы нагрузочных характеристик
Можно получить аналитические выражения для отдельных участков нагрузочной характеристики: При значениях угла перекладки от момент Для балансирных рулей с небольшой степенью компенсации (М1 < М0) принимают М0 = (0,15÷0,2)Ммах. Получим аналитические выражения для отдельных участков нагрузочной характеристики
Для рулей с большой степенью компенсации (М1 > М0) принимают М0 = (0,2 ÷ 0,3)Ммах. Нагрузочная характеристика будет иметь шесть участков. Аналитические выражения для наклонных участков получаются на основании вышеприведенных уравнений подстановкой соответствующих углов и моментов.
При построении нагрузочной характеристики заднего хода М0 принимают равным значению М0 переднего хода для данного руля. При заданном угле дрейфа β можно рассчитать В практике проектирования рулевых приводов принимают: Моп = (1,4÷1,6)Ммах.
4.2. Аппроксимация механических характеристик электродвигателей РЭМ-приводов.
Из анализа требований Правил Регистра следует, что в РЭМ – приводах исполнительные электродвигатели работают с переменной нагрузкой (момент изменяется от минимальных значений до 200 % Мном), должны выдерживать стоянку под током в течение 1 минуты, изменять частоту вращения в широких пределах, осуществлять реверс и торможение. Этим требованиям наилучшим образом отвечают электродвигатели с мягкой характеристикой или включенные по определенным схемам при питании от сети или отдельного источника. ДПТ с параллельным возбуждением. Имеют жесткую естественную характеристику. Включением резистора в цепь якоря можно получить необходимую реостатную характеристику и пусковой момент Мп ≥ 200 % Мном. Реверс обеспечивается»мостовой» схемой включения обмотки якоря, при этом можно осуществить динамическое торможение (механические тормоза в рулевом приводе не применяются).
Механическая характеристика ДПТ с параллельным возбуждением и постоянно включенном резистором в цепь якоря аппроксимируется уравнением прямой:
где nх – частота вращения идеального холостого хода, об/мин; МП – пусковой момент, Н•м; n, M – текущие значения частоты вращения и момента. Из-за низкой экономичности используется при мощности Р = 1 ÷ 2 кВт, сейчас это чаще всего запасный привод. ДПТ с последовательным возбуждением применение не получили, так как при небольшом моменте на валу (М→0) значительно возрастает частота вращения и ЭД может пойти «в разнос». ДПТ смешанного возбуждения. Имеет мягкую естественную характеристику. Для обеспечения стоянки под током при моменте Мп ≥ 200 % Мном в цепь якоря включается пусковой резистор постоянно, или только при пуске и возрастании момента до М = (180 ÷ 200) Мном.
Механическая характеристика аппроксимируется уравнением гиперболы
ДПТ с независимым возбуждением в системе Г – Д с размагничивающей обмоткой на генераторе. Генератор имеет две обмотки возбуждения: независимую LG1 и размагничивающую LG2. Размагничивающая обмотка включается последовательно в цепь якорей ИД и генератора и создает МДС, направленную встречно по отношению к МДС независимой обмотки. Рассчитывается таким образом, чтобы при
С увеличением момента сопротивления на валу двигателя уменьшается угловая скорость, уменьшается противо-эдс в обмотке якоря, возрастает ток в цепи якорей двигателя и генератора, возрастает МДС размагничивающей обмотки генератора, уменьшаются: ЭДС генератора, напряжение на обмотке якоря двигателя, угловая частота вращения двигателя. -
. Естественная характеристика ДПТ с независимым возбуждением в системе Г – Д с размагничивающей обмоткой на генераторе аппроксимируется уравнением параболы:
Такие системы нашли самое широкое распространение в секторном рулевом приводе при мощности ИД от Р = 3-5 кВт и выше. Перспективными являются приводы с ДПТ независимого возбуждения в системе УВ – Д. Приводы с АД практического применения не получили, хотя уже сейчас могут использоваться в системе ПЧ – АД.
|





 [кН]
[кН] [кН•м]
[кН•м]







 , для чего запишем квадратную скобку в раскрытом виде:
, для чего запишем квадратную скобку в раскрытом виде:
 и положительных углах α скобка и момент имеют положительные значения, то есть момент на баллере препятствует перекладке руля.
и положительных углах α скобка и момент имеют положительные значения, то есть момент на баллере препятствует перекладке руля. и углах α близких по значению к нулю вся скобка и значение момента становится отрицательными. Это значит, что момент, возникающий от набегающего потока, стремится довернуть руль на больший угол. В этом случае положение пера руля неустойчиво. При каком-то значении угла α = α1, момент на баллере будет равен нулю, положение руля устойчиво, а угол α1 называется углом устойчивого положения руля. Запишем:
и углах α близких по значению к нулю вся скобка и значение момента становится отрицательными. Это значит, что момент, возникающий от набегающего потока, стремится довернуть руль на больший угол. В этом случае положение пера руля неустойчиво. При каком-то значении угла α = α1, момент на баллере будет равен нулю, положение руля устойчиво, а угол α1 называется углом устойчивого положения руля. Запишем:
 угол α1 ≈ 350, что неприемлемо. В практике проектирования оптимальным считается коэффициент компенсации
угол α1 ≈ 350, что неприемлемо. В практике проектирования оптимальным считается коэффициент компенсации .
. .
. , тем меньше значение максимального момента на баллере Мбmax.
, тем меньше значение максимального момента на баллере Мбmax.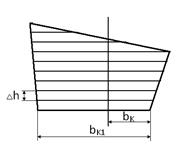


 ,
, ,
, и
и  получают гидродинамические характеристики – зависимости от угла атаки – α и коэффициента компенсации сил и моментов, действующих на руль, рассчитывают и строят кривые соответствующих коэффициентов: Сх – лобового сопротивления; Су – подъемной силы; Сn – нормальной силы; Сt – касательной (тангенциальной) силы; Смб – момента относительно баллера; Сd -
получают гидродинамические характеристики – зависимости от угла атаки – α и коэффициента компенсации сил и моментов, действующих на руль, рассчитывают и строят кривые соответствующих коэффициентов: Сх – лобового сопротивления; Су – подъемной силы; Сn – нормальной силы; Сt – касательной (тангенциальной) силы; Смб – момента относительно баллера; Сd -  - безразмерного коэффициента центра давления.
- безразмерного коэффициента центра давления. [кН]
[кН] [кН•м]
[кН•м] - плотность воды, кг/м3;
- плотность воды, кг/м3;



 . При практических расчетах рулевого привода принимают β = 100 – 120, а опорный момент Мбоп = (1,4÷1,6)Мбмах.
. При практических расчетах рулевого привода принимают β = 100 – 120, а опорный момент Мбоп = (1,4÷1,6)Мбмах. ,
,  , где n – частота вращения ЭД, б/мин.
, где n – частота вращения ЭД, б/мин. ,
,
 момент М = М0, при углах
момент М = М0, при углах 
 , где
, где 

 ; М = М0;
; М = М0; 



 ,
, ;
;  .
. магнитодвижущие силы обеих обмоток были равны.
магнитодвижущие силы обеих обмоток были равны. ;
;
 или
или 



