
Порядок выполнения работы. 1.3.1. Для выполнения п.1.2.2 загрузите систему MatLab: ПУСК/ВСЕ ПРОГРАММЫ/MATLAB/R2011b/ MATLABR2011b.В командном окне наберите sltank
1.3.1. Для выполнения п.1.2.2 загрузите систему MatLab: ПУСК/ВСЕ ПРОГРАММЫ/MATLAB/R2011b/ MATLABR2011b. В командном окне наберите sltank и нажмите клавишу ENTER. Через 15-20сек появится окно с именем sltank, в котором будет представлена структурная схема Simulink-модели sltank (рис.1.2).
1.3.3. Появится анимационное окно, в котором будет отображаться процесс изменения уровня жидкости в резервуаре (рис.1.3).
1.3.4. Дважды щелкните на иконке блока Сomparision. Появится анимационное окно Сomparision (рис.1.4), в котором будет отображаться процесс изменения уровня жидкости в резервуаре (осциллограмма белого цвета) относительно уставки (осциллограмма желтого цвета).и Отметим, что незначительное перерегулирование отмечается только на нижней «полке» импульсов, а время регулирования составляет примерно четверть длительности импульса. 1.3.5. Прервите работу модели, щелкнув ЛК на значке Running. Работа модели приостановится. В левом углу нижней строки окна появится сообщение Paused, а значок Running снова заменится значком Run (запуск). Определите перерегулирование и время регулирования(см.Приложение 1.). 1.3.6. Дважды щелкните ЛК на иконке блока Constant(-1). Откроется окно Sourse Block Parameters:const, в строке Constant Value вместо значения -1 введите значение 1 и нажмите кнопку ОК. Этим самым вместо нечеткого контроллера в модели активизируется ПИД контроллер. В соответствии с п.п.1.3.2 – 1.3.4 снова запустите модель. На рис.1.5 представлено окно Сomparision для ПИД контроллера. Отметим, что перерегулирование значительно больше как на нижней, так и на верхней «полках» импульсов, зато время регулирования меньше и составляет примерно восьмую часть длительности импульса.
Контрольные вопросы. 1.В чем состоит задача управления уровнем жидкости в резервуаре? 2.Какую роль играет уравнение Бернулли при решении задачи управления? 3.Как осуществить загрузку Simulink-модели (sltank.mdl)? 4.Как активизировать в модели ПИД - контроллер? 5.В чем состоит преимущество нечеткого контроллера перед ПИД - контроллером? 6. Как измерить величину перерегулирования, используя блок Scope? 7. Как измерить время регулирования, используя блок Scope?
|
 1.3.2. Запустите модель, щелкнув один раз ЛК на значке (Run). В левом углу нижней строки окна появится сообщение Running (выполняется), и в этой же строке будет отображаться время работы модели с момента ее запуска, а значок Run (запуск) заменится значком Running, имеющим вид II.
1.3.2. Запустите модель, щелкнув один раз ЛК на значке (Run). В левом углу нижней строки окна появится сообщение Running (выполняется), и в этой же строке будет отображаться время работы модели с момента ее запуска, а значок Run (запуск) заменится значком Running, имеющим вид II. Рис.1.3. Окно Tank Demos
Рис.1.3. Окно Tank Demos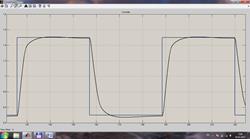 Рис.1.4. Окно Сomparision fuzzy контроллера.
Рис.1.4. Окно Сomparision fuzzy контроллера. Рис.1.5. Окно Сomparision ПИД контроллера.
Рис.1.5. Окно Сomparision ПИД контроллера.


