
Построение профиля кулачка
При графическом построении профиля кулачка применяют метод обращения движения: всем звеньям механизма условно сообщают угловую скорость, равную При построении профиля кулачка из центра – точки О проводят окружность радиусом r0 и окружность радиусом, равным межосевому расстоянию а. Затем отмечают на окружности заданный рабочий угол кулачка Для получения конструктивного (рабочего) профиля кулачка строят эквидистантный профиль, отстоящий от центрового на величину радиуса сферического наконечника толкателя. Он получается как огибающая к дугам, проведенным из произвольных точек центрового профиля радиусом наконечника. Радиус ролика выбирается соотношением: R=(0.25-0.4)r0 = 0.052 м. В конце строим график зависимости угла давления от положения толкателя. Для этого в каждой точке теоретического профиля проводим нормаль и измеряем угол между этой нормалью и направлением скорости в данной точке. Этот угол откладываем на оси ординат. Полученные точки соединяем плавной линией. График давления можно построить и аналитически, достаточно воспользоваться формулой:
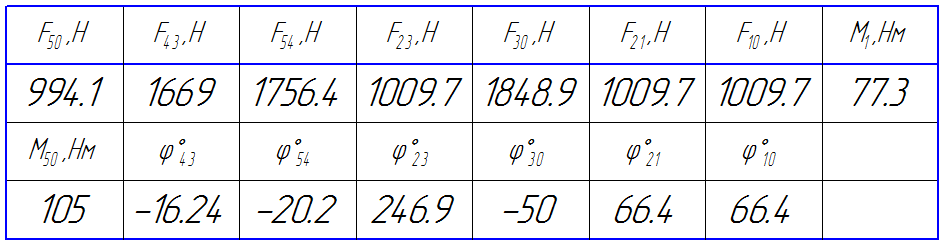
Заключение В ходе выполнения курсового проекта получены следующие результаты: 1) Определен закон движения звена приведения поперечно-строгального станка. Построены диаграммы передаточных функций, моментов инерции, работ, кинетических энергий. Было установлено, что для данной установки требуется введение дополнительной маховой массы. JI = 22.711 кг*м2 2)Для заданного положения механизма проведен силовой расчет, определены реакции в кинематических парах механизма и уравновешивающий момент, действующий на звено 1. Таблица 2.
3) Спроектирована эвольвентная цилиндрическая зубчатая передача с числами зубьев колёс 4) Спроектирован двухрядный планетарный редуктор со смешанным зацеплением с передаточным отношением u 1h =15 и числами зубьев z1=36, z2 =72, z 3 =18, z 4=126. 5) Спроектирован кулачковый механизм с качающимся толкателем. Минимальный радиус центрового профиля кулачка r0=0.209 м при допустимом угле давления [θ]=35º. Радиус ролика толкателя rр=0.052 м, радиус начальной шайбы конструктивного профиля r=0.157 м, межосевое расстояние aw=0.282 м.
Список литературы 1. Теория механизмов и машин. Курсовое проектирование: учеб. пособие / под редакцией Г.А. Тимофеева. – 2-e изд., перераб. и доп. – М.: Изд-во МГТУ им. Н.Э. Баумана, - 2012. – 169, [3] c.: ил. 2. Сборник заданий для курсового проектирования по дисциплине «Основы проектирования машин. Часть 1. Теория механизмов и механика машин»: Учебное пособие / С. А. Попов, В. Б. Тарабарин, Г. А. Тимофеев и др.; Под ред. С. А. Попова. - М.: Изд-во МГТУ, 1993. 3. Г. А. Тимофеев, М. В. Самойлова. Проектирование кулачковых механизмов / под ред. С. А. Попова. М.: Изд-во МГТУ, 1998. 4. Силовой расчёт механизмов: Учеб. Пособие / Тимофеев Г.А., Тарабарин В.Б., Черная Л.А., Барышникова О.О.; Под ред. В.Б. Тарабарина. - М.:Изд-во МГТУ им. Н.Э. Баумана, 2000. 88 с., ил. 5. «Проектирование зубчатых передач и планетарных механизмов с использованием ЭВМ»: Учебное пособие для курсового проектирования / Каганова В.В., Никоноров В.А., Тимофеев Г.А., Яминский А.В.; Под ред. Тимофеева Г.А. - М.:Изд-во МВТУ им. Н.Э. Баумана, 1987 г.
Список ПО: КОМПАС-3D, MathCad, Diada.
|
 . При этом кулачок становится неподвижным, а остальные звенья вращаются с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости кулачка.
. При этом кулачок становится неподвижным, а остальные звенья вращаются с угловой скоростью, равной по величине, но противоположной по направлению угловой скорости кулачка. и делят полученный сектор на части (их количество должно быть равно количеству отрезков разбиения на графике). На концах каждого радиуса проводят отрезок длиной толкателя, соединяя его с окружностью радиусом а. Затем откладывают от этих примых по дуге перемещения толкателя, соответствующие отложенным углам.
и делят полученный сектор на части (их количество должно быть равно количеству отрезков разбиения на графике). На концах каждого радиуса проводят отрезок длиной толкателя, соединяя его с окружностью радиусом а. Затем откладывают от этих примых по дуге перемещения толкателя, соответствующие отложенным углам.
 и
и  . Коэффициентами смещения X 1=0.8 X 2=0.5 и коэффициентом перекрытия εα = 1.1.
. Коэффициентами смещения X 1=0.8 X 2=0.5 и коэффициентом перекрытия εα = 1.1.


