
Направляющее устройство
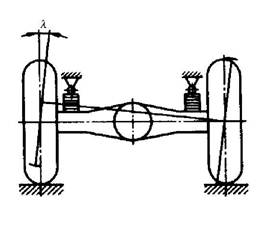
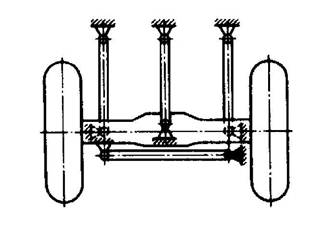
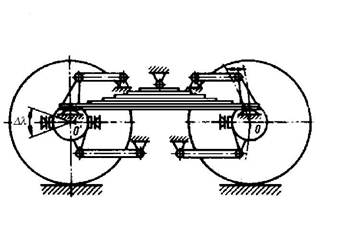
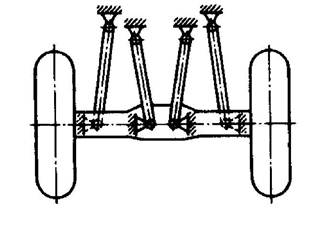
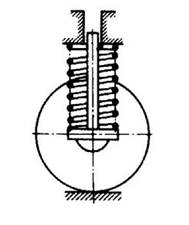
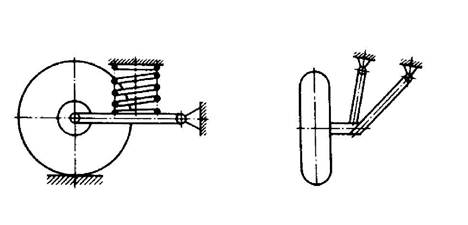
Схемы направляющего устройства. В зависимой подвеске с полуэллиптическими рессорами упругий элемент может полностью или частично выполнять функции направляющего устройства (рис. 10.4, а, б). В случае использования в качестве упругих элементов, например пружин, кинематика подвески обеспечивается пространственным механизмом, который обычно состоит из четырех диагональных или трех-четырех продольных и одного поперечного рычагов (рис.10.4, в, г).
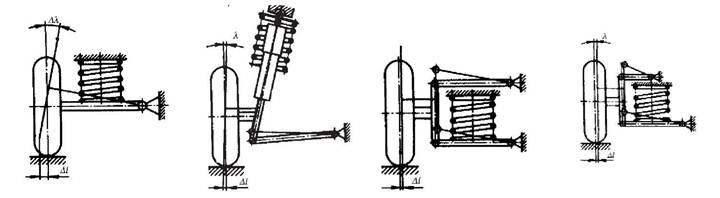
Рис.10.4. Схемы направляющего устройства зависимой подвески По конструкции направляющего устройства независимые подвески могут быть безрычажные (телескопические), однорычажные и двухрычажные. Однорычажные подвески выполняют с качанием рычага в поперечной, продольной и смежной плоскостях (рис. 10.5, а, б, д, е), а двухрычажные - с качанием рычагов только в поперечной плоскости (рис.10.5, в, г), безрычажные - с вертикальным перемещением.
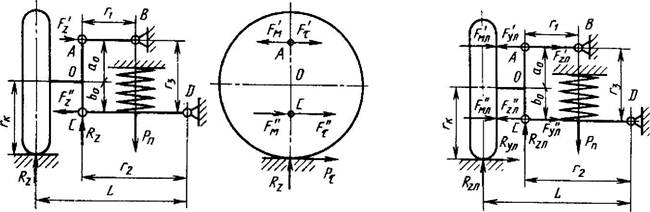
Мг = 1какЮх sin a, где Ik - момент инерции колеса относительно его оси вращения, Щ - угловая скорость колеса, щх = dX / dt - угловая скорость изменения плоскости вращения колеса, a - угол между векторами Щ и Щх Переменный гироскопический момент вызывает колебания колеса относительно шкворня, что ухудшает управляемость автомобиля. Независимая подвеска с двумя поперечными рычагами равной длины (рис.10.5, в) полностью исключает изменение угла наклона плоскости вращения колеса. В то же время происходит значительное изменение ширины колеи Al, что обуславливает ускоренное изнашивание шин. Двухрычажная подвеска с рычагами разной длины (рис. 10.5, г) одна из перспективных. При соотношении длин рычагов rj lr2 = 0, 55...0, 65 ограничивают угол А< 5...60 и поперечное перемещение колеса Al < 20...25мм, при которых гироскопический момент уравновешивается моментом трения в системе, а изменение колеи компенсируется деформацией шины. Рычажно-телескопическая подвеска (рис. 10.5, б) имеет один нижний рычаг и амортизационную стойку, которая совмещает функции направляющего, упругого, гасящего устройств и шкворня. Такая подвеска обеспечивает незначительное изменение ширины колеи, развала и схождения колес, что дает малый износ шин и заданную устойчивость автомобиля. Для трехосных автомобилей типичной подвеской среднего и заднего ведущих мостов является балансирная подвеска с полуэллиптической рессорой (рис. 10.4, б). Эта подвеска выравнивает вертикальные реакции на колесах и обуславливает перемещение кузова в точке крепления оси балансира вдвое меньше, чем относительные перемещения колес тележки. Расчет элементов направляющего устройства. Расчет элементов направляющего устройства проводится при следующих параметрах: 1) силе тяги Pk =$RZ, Py = 0, q = 0, 7...0, 8; 2) тормозной силе PT=qRz, Py = 0, (р = 0, 7...0, 8; 3) боковой силе (занос) Py = (p'Rz, Pk = PT = 0, < p' = 1 (q - коэффициент сцепления колеса с дорогой в боковом направлении); 4) вертикаЛьН°й сиЛе Pz = Pz ma^ Pk = PT = Py = 0. Вертикальную реакцию Rz определяют с учетом перераспределения нагрузки по колесам автомобиля. Рассмотрим расчет направляющего устройства на примере независимой двухрычажной подвески (рис. 10.6).
Для второго расчетного случая сила Rz (рис.10.6, а) на плече L - r2 создает момент, который / уравновешивается моментом Fz r3 на вертикальной стойке. Тогда F'z= Fz = Rz (L - r2)/ г,. Под действием тормозной силы PT и момента Мт = PTrk в шарнирах рычагов возникают силы, / ff Г ГГ действующие в продольной плоскости: FT = PTbo / r3, FT = PTao / r3, FM = FM = PTrk / r3. / / / Следовательно, верхний рычаг испытывает изгиб от силы FM - FT и сжатие от силы Fz, нижний - изгиб от сил Rz, Pn, FM + FT и растяжение от силы Fz. При третьем расчетном случае нагружения из равенства моментов от силы Rzn на левом колесе / № (рис.10.6, б) и стойке Fzn = Fz = Rzn(L -r2)/r3. Боковая сила и момент, обусловленный боковой силой, создают на рычаге следующие силы: F' = R b / r F" = R а / r F' = F" = R r / r 1 yn 1VynUo' '33 1 ул 1уулио' r3-> мл мл ^y/k' '3 • Таким образом, верхний рычаг левой стойки работает на сжатие или растяжение от силы F'yn + Fzn - F'm, а нижний - на изгиб от сил Rzn, Rn и растяжение или сжатие от силы Fy" т + F" Mn - Fzn. Размеры рычагов направляющего устройства определяют для одного из четырех принятых расчетных случаев, для которого нагрузки на элементы подвески наибольшие. Рычаги подвески могут быть штампованными из легированных сталей 12ГС, литыми из сталей 40Л (5 5Л), коваными из легированных конструкционных сталей 40Х, 40ХН. Вертикальную стойку выполняют из стали 30Х или 40Х.
|
 а)
а)
 г)
г)
 б)
б)
 в)
в)
 д) е) ж)
Рис.10.5. Схемы направляющего устройства независимой подвески Кинематическую схему подвески управляемого ведущего моста и размеры направляющих элементов выбирают из условий обеспечения малых углов X поворота плоскости колеса, небольших изменений колеи и базы автомобиля, необходимых статического и динамического прогибов подвески, а также согласования с угловыми перемещениями карданной передачи. Движение автомобиля даже по ровной дороге практически сопровождается поперечными угловыми колебаниями неподрессоренных масс. При этом в зависимости от кинематической схемы возможно изменение угла, что приводит к появлению гироскопического момента
д) е) ж)
Рис.10.5. Схемы направляющего устройства независимой подвески Кинематическую схему подвески управляемого ведущего моста и размеры направляющих элементов выбирают из условий обеспечения малых углов X поворота плоскости колеса, небольших изменений колеи и базы автомобиля, необходимых статического и динамического прогибов подвески, а также согласования с угловыми перемещениями карданной передачи. Движение автомобиля даже по ровной дороге практически сопровождается поперечными угловыми колебаниями неподрессоренных масс. При этом в зависимости от кинематической схемы возможно изменение угла, что приводит к появлению гироскопического момента
 а) б)
Рис.10.6
а) б)
Рис.10.6



