
Краткая теория. При вращательном движении твердого тела вокруг неподвижной оси каждая точка тела движется в плоскости
При вращательном движении твердого тела вокруг неподвижной оси каждая точка тела движется в плоскости, перпендикулярной оси, по окружности, центр которой лежит на оси. Линейная скорость точки тела v связана с угловой скоростью тела.
где r – расстояние от точки тела до оси вращения. Кинетическая энергия тела равна сумме кинетических энергий всех частиц тела:
где
Величина называется моментом инерции тела. Момент инерции характеризует распределение массы в твердом теле относительно оси вращения и является мерой инертности вращающегося тела. Выражение для кинетической энергии вращающегося тела вокруг неподвижной оси, исходя из формул (3) и (4), выглядит следующим образом:
. Для вычисления моментов инерции различных тел массу
Теорема Штейнера устанавливает связь между моментом инерции тела Iс относительно оси, проходящей через центр инерции, и моментом инерции I этого тела относительно другой оси, параллельной первой.
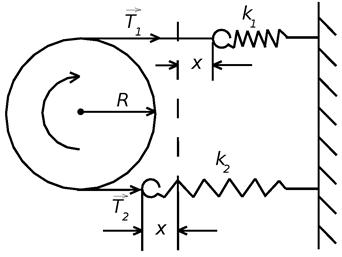
где m – масса тела, а – расстояние между осями. В настоящей работе измеряется момент инерции различных тел с помощью крутильного маятника. Этот маятник состоит из горизонтально расположенного поворотного стола, на котором могут закрепляться различные тела. На оси поворотного стола закреплен шкив радиусом R, с помощью которого столу может сообщаться вращательное движение. Через шкив перекинута нить, к концам которой прикреплены две пружины (рис. 1) c коэффициентами жесткости k 1 и k 2.
Рис. 1. Крутильный маятник В положении равновесия силы натяжения нити по разные стороны от шкива одинаковы и равны упругим силам, которые согласно закону Гука (F упр ) 0 = k 1 x 01 = k 2 x 02, (8) где x01 и x02 - величины растяжения пружин. При отклонении от положения равновесия поворотный стол совершает колебания под действием сил упругости двух пружин. Величина деформации одной пружины x1 = x01 + х, где х – отклонение от равновесного положения. Если нить нерастяжимая, то величина деформации другой пружины х2 = х 02 – х. Запишем выражение для потенциальной энергии деформации пружин следующим образом:
Если пренебрегать силами трения, то согласно закону сохранения механической энергии, полная механическая энергия, т. е. сумма кинетических и потенциальных энергий,
не зависит от времени. Значит, Вычисляя производную от выражения (11) по времени, получим
Если нить не проскальзывает по шкиву поворотного стола, то
где j - угол поворота стола от положения равновесия;
Обозначим
Решение этого уравнения: j(t) = A cos(ω о t + α), (15)
где А – амплитуда колебаний, ω о - циклическая частота колебаний, α - начальная фаза колебаний.
(16) .
. ( 1 7)
|
 , (1)
, (1) , (2)
, (2) - элементарные массы, на которые мысленно разбито тело. Подставляя скорость vi из формулы (1) в (2), получим
- элементарные массы, на которые мысленно разбито тело. Подставляя скорость vi из формулы (1) в (2), получим (3)
(3) (4)
(4)
 . (6)
. (6) ,
,
 (x 01 + x)2 (9)
(x 01 + x)2 (9) (x 02 - x)2 (10)
(x 02 - x)2 (10) (x 01 + x)2 +
(x 01 + x)2 +  (x 02 - x)2 (11)
(x 02 - x)2 (11) .
. (12)
(12)
 . Учитывая условие равновесия (8) и определение угловой скорости
. Учитывая условие равновесия (8) и определение угловой скорости  получим из уравнения (12)
получим из уравнения (12)
 (13)
(13) и
и – суммарный коэффициент жесткости двух пружин. Тогда уравнение (13) принимает вид дифференциального уравнения гармонических колебаний
– суммарный коэффициент жесткости двух пружин. Тогда уравнение (13) принимает вид дифференциального уравнения гармонических колебаний . (14)
. (14) Период колебаний
Период колебаний В данной работе находится момент инерции. Из формулы (16) следует
В данной работе находится момент инерции. Из формулы (16) следует


