
Пуск двигателей постоянного тока
Достоинство двигателей постоянного тока заключается в возможности получения больших пусковых моментов, что уменьшает время запуска нагруженных двигателей. С другой стороны, жесткость механических характеристик двигателей с параллельным возбуждением позволяет получить стабильность работы при изменении момента нагрузки в значительных пределах. Но большие механические моменты на валу требуют прохождения больших токов по обмотке якоря в сети питания двигателя, что создает проблемы с выбором сечения проводов электрической сети, мощности источника питания и системы защиты двигателя. Поэтому основная задача, возникающая при пуске двигателей, заключается в получении оптимальной величины пускового механического момента и минимального пускового тока двигателя. На практике используются три способа пуска двигателей постоянного тока: 1) прямое включение двигателя в сеть; 2) пуск двигателя с помощью реостата, включенного последовательно с обмоткой якоря и предназначенного для ограничения величины пускового тока двигателя. Такой способ пуска называют реостатным пуском; 3) пуск двигателя с помощью специальных установок. Пуск двигателей прямым включением возможен в том случае, когда питающая сеть обеспечивает кратковременный пропуск токов, больших номинального тока в десятки раз. Как правило, с помощью прямого включения осуществляется пуск двигателей только малой мощности. Реостатный пуск двигателей достаточно прост, но при запуске в пусковом реостате теряется большое количество энергии. При таком способе запуска двигателя возможно появление кругового огня на коллекторе из-за больших пусковых токов и система защиты двигателя должна быть более сложной. Сеть питания двигателя должна быть хорошо рассчитана.
На рис. 3.15 приведена схема включения двигателя параллельного возбуждения, используемая при реостатном пуске. На схеме представлены: R рв - реостат
При прямом пуске двигателя, т. е. при подключении двигателя к сети при R п = 0, ток якоря и частота вращения якоря изменяются в функции времени по сложному закону. Графики этих зависимостей представлены на рис. 3.16.
Частота вращения изменяется в функции времени по закону, близкому к экспоненциальному закону. Ток якоря за очень короткий промежуток времени, измеряемый миллисекундами, достигает значения, близкого к величине Реостатный пуск необходим в тех случаях, когда сеть или источник питания двигателя не рассчитаны на прохождение пусковых токов, превышающих номинальный ток в 10–15 раз. Как правило, речь идет о двигателях средней и большой мощности. Для уменьшения пускового тока двигателя последовательно с якорем включается пусковой реостат, сопротивление которого рассчитывается для каждого двигателя. При включенном пусковом реостате сопротивление цепи якоря равняется сумме сопротивления пускового реостата и сопротивления якоря
где I п - пусковой ток двигателя, R п - сопротивление пускового реостата. Сопротивление пускового реостата рассчитывается таким образом, чтобы величина пускового механического момента превышала номинальное значение в полтора-два раза. При увеличении частоты вращения якоря сопротивление пускового реостата уменьшают плавно или дискретно, вручную или автоматически. Специальные пусковые реостаты предусматривают устройства подключения и контроля тока возбуждения, чтобы исключить питание якоря двигателя при обрыве цепи обмотки возбуждения. Рассмотрим технологию запуска двигателя постоянного тока
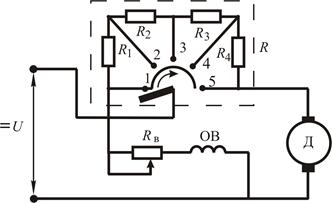
Рис. 3.17 Пусковой реостат в рассматриваемом случае секционирован. Сопротивление каждой секции реостата вычисляется и зависит от режима запуска. Полное его сопротивление равно сумме сопротивлений секций
Если подвижный контакт находится в положении «0», то цепь якоря и цепь обмотки возбуждения отключены от источника питания. При переводе подвижного контакта в положение «1» цепь обмотки возбуждения получает питание непосредственно от источника и с этого момента остается подключенной к сети при всех последующих положениях подвижного контакта. При таком положении подвижного контакта последовательно с якорем включено полное сопротивление реостата R п. Пусковой ток будет равен
Механический момент, развиваемый двигателем, будет равен
Как уже указывалось выше, сопротивление пускового реостата выбирается такой величины, чтобы пусковой момент был бы в полтора – два раза больше номинального момента, т. е. В соответствии с механической характеристикой, соответствующей полному сопротивлению реостата (прямая 1), двигатель разовьет скорость n 1 при номинальном моменте сопротивления М н. На рисунке значению n 1 соответствует максимальная частота вращения при полностью введенном пусковом реостате. ПротивоЭДС якоря достигнет значения
а ток якоря уменьшится до номинальной величины. При достижении частоты вращения n 1 подвижной контакт пускового реостата переводится в положение «2» и его сопротивление уменьшается до значения
При таком сопротивлении ток якоря увеличивается снова до значения 1, 5 I н , режим работы двигателя определяется искусственной механической характеристикой 2. В соответствии с этой характеристикой двигатель разгоняется до частоты вращения n 2. Подвижной контакт переводится в положение 3, после чего в двигателе происходят процессы, подобные процессам, описанным выше. Далее контакт переводят в 4 -е положение и, наконец, в 5 -е. При таком положении подвижного контакта пусковой реостат полностью выведен из цепи якоря, и двигатель начинает работать в соответствии со своей естественной механической характеристикой, обеспечивая номинальную частоту вращения n н . Пуск двигателя закончен.
Расчет пускового реостата, т. е. вычисление его полного
В приведенной формуле U – напряжение питания; I н – номинальный ток; R я – сопротивление якоря; k – коэффициент перегрузки при пуске двигателя (k» 1, 2, …, 3). Сопротивления секций R 1, R 2, R 3и R 4 вычисляются исходя из следующих соображений. При полностью введенном сопротивлении реостата установившийся режим будет иметь место тогда, когда момент двигателя будет равен номинальному М н. Ток якоря в этом случае будет ранен номинальному I н. Следовательно, Откуда ЭДС При изменении положения подвижного контакта сопротивление реостата будет равно
Коэффициент k в приведенной формуле равен отношению максимального тока якоря допустимого при запуске к номинальному току. Из приведенной формулы получаем величину сопротивления реостата на втором этапе пуска двигателя
При измененном сопротивлении установившийся режим будет иметь место при
И, наконец,
Более детальное секционирование пускового реостата нецелесообразно. Обычно используют пусковые реостаты, состоящие из 4-7 секций. Сопротивления отдельных секций, т. е. значения R 1, R 2, R 3, R 4 легко вычисляются из полученных значений в соответствии со схемой (рис. 3.20).
При использовании несекционированного пускового реостата сопротивление уменьшается с таким расчетом, чтобы ток якоря был максимально близким к значению Наилучший результат дают автоматические системы пуска двигателей постоянного тока, обеспечивающие плавный и быстрый пуск. Все автоматические системы создаются на основании получения определенного закона изменения тока якоря во времени Графики изменения тока якоря и частоты вращения двигателя при пуске двигателя с помощью секционированного пускового реостата представлены на рис. 3.20. Следует помнить о том, что пусковой реостат работает кратковременно, поэтому его номинальная мощность может быть меньшей, чем максимальная мощность, вычисленная из соотношения для рассматриваемого случая
Пуск двигателей с последовательным и смешанным возбуждением осуществляется аналогично пуску двигателей с независимым возбуждением. 3.6. Регулирование частоты вращения двигателей 3.6.1. Регулирование частоты вращения двигателей Основным преимуществом двигателей постоянного тока является сравнительная простота регулирования частоты вращения якоря в больших пределах. Основными способами регулирования частоты вращения якоря двигателей являются: - якорное регулирование, - полюсное регулирование, - реостатное регулирование. Сущность каждого способа регулирования частоты вращения можно понять, анализируя уравнение, определяющее связь между частотой вращения, напряжением питания, сопротивлением регулировочного реостата и током возбуждения. Ток возбуждения определяет магнитный поток машины. Уравнение электрического равновесия двигателя, последовательно с якорем которого включен регулировочный реостат сопротивлением R р:
Отсюда
Регулировочное сопротивление включается последовательно с якорем, подобно пусковому реостату. Оно работает в длительном режиме, поэтому его номинальная мощность определяется максимальной рассеиваемой мощностью при самых неблагоприятных условиях. Из формулы следует, что частота вращения пропорциональна приложенному напряжению и обратно пропорциональна магнитному потоку Рассмотрим каждый способ управления двигателем. Якорное управление Под якорным управлением понимают регулирование скорости вращения якоря двигателей постоянного тока путем изменения напряжения на зажимах якоря двигателя. Напряжение на зажимах обмотки возбуждения должно оставаться неизменным. При таком способе управления двигателем регулировочное сопротивление не используют, и сопротивление цепи якоря определяется только сопротивлением обмотки якоря R я . Тогда
При неизменной величине магнитного потока и сопротивления цепи якоря
Очевидно то, что и Если двигатель нагружен номинальным моментом М н, то каждому напряжению соответствует своя частота вращения, пропорциональная приложенному напряжению U. Номинальному напряжению U нсоответствует номинальная частота вращения n н. Напряжение меньше номинального Полюсное управление Под полюсным управлением двигателя постоянного тока понимают регулирование частоты вращения якоря путем изменения напряжения на зажимах обмотки возбуждения. При полюсном управлении двигателем при постоянном моменте на валу ток якоря и напряжение на якоре остаются неизменными. Регулируют лишь ток возбуждения, изменение которого приводит к изменению магнитного потока. Из уравнения скорости
очевидно то, что числитель дроби остается величиной постоянной и частота вращения обратно пропорциональна магнитному потоку.
Рассмотрим семейство механических характеристик двигателя, соответствующих различным значениям тока возбуждения, предполагая, что магнитная цепь машины не насыщена и магнитный поток прямо пропорционален току возбуждения. Как и прежде, построение механических характеристик будем вести, определяя частоту вращения идеального холостого хода n 0 и величину пускового момента M п. На рис. 3.22 изображено семейство полных механических характеристик, соответствующих различным значениям тока возбуждения. Естественная механическая характеристика представляет собой прямую линию, проходящую через точки
При уменьшении тока возбуждения на 20 % частота вращения идеального холостого хода Механические характеристики двигателя постоянного тока
Рис. 3.23
При изменении тока возбуждения угол наклона механических характеристик изменяется. При этом уменьшение тока возбуждения приводит к увеличению частоты вращения, а увеличение тока возбуждения дает уменьшение частоты вращения двигателя. Диаметр провода обмотки возбуждения выбирается из условия прохождения номинального тока, поэтому значительное увеличение тока возбуждения до значений выше номинального приводит к перегреву обмотки возбуждения. Иногда допускают превышение тока возбуждения на 15-20 %. Из уравнения механической характеристики следует то, что частота вращения идеального холостого хода обратно пропорциональна магнитному потоку Теоретически уменьшение тока возбуждения в два раза дает двукратное увеличение частоты вращения, что уже недопустимо. Дальнейшее уменьшение тока возбуждения приводит к аварийной ситуации и к выходу двигателя из строя. Поэтому системы защиты двигателя контролируют величину тока возбуждения и отключают напряжение питания якоря при опасно малых токах возбуждения. Таким образом, возможности полюсного управления двигателей постоянного тока весьма ограничены. Реостатное регулирование
Под реостатным управлением двигателя постоянного тока понимают изменение скорости вращения двигателя путем изменения сопротивления цепи якоря. Для такого регулирования последовательно с якорем включают реостат
Рассмотрим полные механические характеристики при различных сопротивлениях регулировочного реостата. Семейство полных механических характеристик двигателя при различных величинах сопротивлений регулировочного реостата R регпоказано на рис. 3.25. Ранее получена формула, описывающая механическую характеристику двигателя при включенном последовательно с якорем регулировочном реостате
Положение механической характеристики определяется двумя точками: скоростью идеального холостого хода
Из приведенных формул следует, что скорость идеального холостого хода не зависит от сопротивления регулировочного реостата. Величина же пускового момента обратно пропорциональна этому сопротивлению. Поэтому угол наклона характеристик при увеличении сопротивления регулировочного реостата увеличивается При неизменном механическом моменте ток якоря является величиной постоянной, и вторая слагаемая уравнения скорости При таком способе регулирования частоты вращения при постоянном моменте на валу мощность, потребляемая из сети, остается неизменной 3.6.2. Регулирование частоты вращения двигателя Якорное, полюсное и реостатное регулирование частоты вращения в большей степени применимы для двигателей с независимым, параллельным и смешанным возбуждением, так как они имеют обмотку возбуждения, ток которой не зависит от тока якоря. Речь идет о параллельной обмотке возбуждения. Двигатели с последовательным возбуждением имеют свои конструктивные особенности. Двигатели с последовательным возбуждением классической конструкции имеют одну обмотку, предназначенную для последовательного соединения с якорем. Поэтому при отсутствии дополнительных устройств ток обмотки возбуждения всегда равен току якоря. Перераспределение токов при необходимости можно реализовать с помощью дополнительных реостатов, включаемых, как правило, параллельно с обмоткой якоря или параллельно с обмоткой возбуждения.
Ранее было получено уравнение механической характеристики двигателя постоянного тока последовательного воз-буждения, схема которого изображена
В этом уравнении при постоянстве механического момента а) напряжения питания U; б) сопротивления R, равного сумме сопротивлений регу-лировочного реостата, обмотки возбуждения и якоря, т. е.
Поэтому на практике основными способами изменения частоты враще-ния якоря двигателя последователь-
Механические характеристики показывают, что изменение питающего напряжения приводит почти к пропорциональному изменению частоты вращения двигателя. При таком способе регулирования регулировочный реостат исключают из цепи якоря, поэтому При постоянном напряжении
Увеличение сопротивления регулировочного реостата приводит к уменьшению частоты вращения. При таком способе управления двигателем не следует забывать о значительных потерях электрической энергии в регулировочном реостате и об уменьшении пускового момента при увеличении сопротивления регулировочного реостата R рег . Возможны и два других способа изменения частоты вращения двигателя последовательного возбуждения: а) изменением тока возбуждения с помощью реостата, шунтирующего обмотку возбуждения (рис. 3.30); б) изменением тока якоря путем подключения реостата параллельно якорю (рис. 3.31).
Наилучшим из всех рассмотренных способов является регулирование частоты вращения изменением питающего напряжения. Однако для этого необходим источник постоянного регулируемого напряжения достаточной мощности, способный допускать перегрузку пусковым током, который всегда больше номинального тока двигателя. В настоящее время существуют источники питания, в которых используются управляемые выпрямители, допускающие кратковременные перегрузки.
|
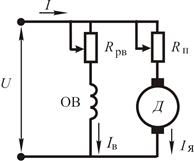
 Рис. 3.16
Рис. 3.16
 , где
, где  .С возрастанием частоты вращения и величины противоЭДС ток якоря уменьшается до установившегося значения, определяемого током холостого хода, если двигатель не нагружен, или до значения, достаточного для обеспечения преодоления механического момента сопротивления нагрузки. Длительность переходного процесса
.С возрастанием частоты вращения и величины противоЭДС ток якоря уменьшается до установившегося значения, определяемого током холостого хода, если двигатель не нагружен, или до значения, достаточного для обеспечения преодоления механического момента сопротивления нагрузки. Длительность переходного процесса  . Пусковой ток двигателя без учета тока возбуждения можно вычислить по закону Ома:
. Пусковой ток двигателя без учета тока возбуждения можно вычислить по закону Ома: ,
,
 .
. .
. .
. Рис. 3.18
Рис. 3.18
 . Пусть в нашем случае
. Пусть в нашем случае  . Тогда меха-ническая характеристика двигателя
. Тогда меха-ническая характеристика двигателя  (рис. 3.18).
(рис. 3.18). ,
, .
. Рис. 3.19
Рис. 3.19
 .
. .
. .
. . Частота вращения останется неизменной. Прежней останется и ЭДС двигателя. Следовательно,
. Частота вращения останется неизменной. Прежней останется и ЭДС двигателя. Следовательно, .
.
 . Проводя рассуждения аналогично предыдущим, получаем:
. Проводя рассуждения аналогично предыдущим, получаем: .
. .
.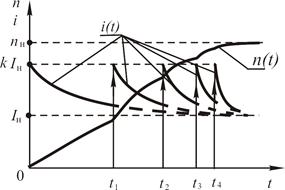 Рис. 3.20
Рис. 3.20

 .
. , что обеспечивает минимальное время запуска двигателя.
, что обеспечивает минимальное время запуска двигателя. .
. или
или  .
. .
. .
. .
. , но при различных значениях напряжения питания двигатель будет иметь различные искусственные механические характеристики, проходящие через точку частоты вращения идеального холостого хода, величина которой определяется из уравнения
, но при различных значениях напряжения питания двигатель будет иметь различные искусственные механические характеристики, проходящие через точку частоты вращения идеального холостого хода, величина которой определяется из уравнения  и находится на оси частот вращения n. Другая точка механической характеристики определяется величиной пускового момента
и находится на оси частот вращения n. Другая точка механической характеристики определяется величиной пускового момента .
. Рис. 3.21
Рис. 3.21
 и
и  пропорциональны напряжению питания якоря U
пропорциональны напряжению питания якоря U  обеспечивает меньшую частоту вращения
обеспечивает меньшую частоту вращения  . Аналогично изменяется частота вращения при увеличении напряжения
. Аналогично изменяется частота вращения при увеличении напряжения  и
и  . Падение напряжения на сопротивлении якоря при неизменном моменте остается постоянным. Увеличение напряжений до значений, больших номинального, нежелательно, так как частота вращения при этом становится больше номинальной величины, а это может привести к преждевременному износу машины. На практике иногда допускается увеличение напряжения на якоре на 15–20 % выше номинального напряжения.
. Падение напряжения на сопротивлении якоря при неизменном моменте остается постоянным. Увеличение напряжений до значений, больших номинального, нежелательно, так как частота вращения при этом становится больше номинальной величины, а это может привести к преждевременному износу машины. На практике иногда допускается увеличение напряжения на якоре на 15–20 % выше номинального напряжения.
 Рис. 3.22
Рис. 3.22
 и
и  .
. при этом уменьшается на 20 % (см. рис. 3.22). При увеличении тока возбуждения на 20 % происходит уменьшение частоты вращения идеального холостого хода
при этом уменьшается на 20 % (см. рис. 3.22). При увеличении тока возбуждения на 20 % происходит уменьшение частоты вращения идеального холостого хода  .Пусковой момент при этом увеличится в такое же число раз.
.Пусковой момент при этом увеличится в такое же число раз. до
до  представлены на рис. 3.23.
представлены на рис. 3.23.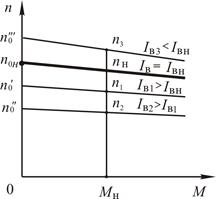
 ,
,  .
. Рис. 3.24
Рис. 3.24
 (рис. 3. 2 4). Изменение частоты вращения двигателя постоянного тока с помощью регулировочного реостата возможно в том случае, когда двигатель нагружен механическим моментом, близким к номинальной величине. Принцип регулирования основан на том, что при изменении сопротивления цепи якоря изменяется угол наклона механической характеристики двигателя к оси моментов и при постоянном механическом моменте сопротивления на валу частота вращения изменяется. Схема включения двигателя изображена на рис. 3.24.
(рис. 3. 2 4). Изменение частоты вращения двигателя постоянного тока с помощью регулировочного реостата возможно в том случае, когда двигатель нагружен механическим моментом, близким к номинальной величине. Принцип регулирования основан на том, что при изменении сопротивления цепи якоря изменяется угол наклона механической характеристики двигателя к оси моментов и при постоянном механическом моменте сопротивления на валу частота вращения изменяется. Схема включения двигателя изображена на рис. 3.24. Рис. 3.25
Рис. 3.25
 .
. и пусковым моментом
и пусковым моментом  .
. Рис. 3.26
Рис. 3.26
 . Механические характеристики двигателя для значений моментов от 0 до 1, 5 М н и при различных величинах сопротивлений регулировочного реостата R регпоказаны на рис. 3.26.
. Механические характеристики двигателя для значений моментов от 0 до 1, 5 М н и при различных величинах сопротивлений регулировочного реостата R регпоказаны на рис. 3.26. , имея отрицательный знак, увеличивается
, имея отрицательный знак, увеличивается  .
. . Выходная же мощность двигателя при уменьшении частоты вращения уменьшается, так как
. Выходная же мощность двигателя при уменьшении частоты вращения уменьшается, так как  . Мощность потерь
. Мощность потерь  , равная разности мощности, потребляемой из сети, и выходной мощности, с уменьшением частоты вращения увеличивается за счет увеличения мощности нагревания регулировочного реостата, так как потери в самом двигателе изменяются незначительно. КПД всей установки при таком способе регулирования частоты вращения гораздо меньше номинального значения. С точки зрения энергетических затрат такой способ регулирования частоты вращения неэффективен.
, равная разности мощности, потребляемой из сети, и выходной мощности, с уменьшением частоты вращения увеличивается за счет увеличения мощности нагревания регулировочного реостата, так как потери в самом двигателе изменяются незначительно. КПД всей установки при таком способе регулирования частоты вращения гораздо меньше номинального значения. С точки зрения энергетических затрат такой способ регулирования частоты вращения неэффективен. Рис. 3.27
Рис. 3.27
 .
. .
. Рис. 3.28
Рис. 3.28
 Рис. 3.29
Рис. 3.29
 .
.

 Рис. 3.30 Рис. 3.31
Рис. 3.30 Рис. 3.31


