
Самолетные дальномеры
Самолетные дальномеры являются частью дальномерных радионавигационных систем, которые обычно устанавливают в дополнение к угломерным РМ в тех местах, где из-за высокой интенсивности воздушного движения, близости маршрутов и по другим причинам, требуется более высокая точность, достигаемая с помощью РМ VOR. Как правило, ретрансляторы дальности этих систем обычно совмещаются с точкой размещения ВРМ VOR. Система типа VOR/DME рекомендована ICAO в качестве системы ближней навигации гражданских ВС. Для работы с РМ DME на борту ВС ГА используются следующие виды радиодальномеров: СД-67, СДК-67, СД-75, DME-85. Эксплутационно-технические характеристики этих дальномеров близки. Согласно стандартам ИКАО для них выделяются следующие диапазоны частот: для запроса 1025….1150МГц, для ответа 962….1213МГц. В указанном диапазоне формируется 252 независимых каналов. В указанной аппаратуре используется временной (импульсный) метод измерения дальности с запросом с ВС. Структурная схема самолетного дальномера.
Рис.17. Структурная схема самолетного дальномера
работу, представлены на рис.17. Устройство, называемое хронизатором (Х) определяет последовательность функционирования всех элементов аппаратуры. Оно формирует последовательность тактовых импульсов с периодом Ти, который выбирается из условия однозначного определения дальности. Импульсы Х поступают на кодирующее устройство КУ и запускают схему измерения дальности в измерительном устройстве (ИУ). Кодирующее устройство преобразует одиночные импульсы с выхода Х в двухимпульсные коды запроса с кодовым интервалом Тк.з. Этими импульсами запускается передатчик запросчика (ПРД). Высокочастотный сигнал, через приемо-передающую антенну (А) излучается в пространство на частоте запроса f
t З = 2r /c + Tкз + t0 + Tко
где t З - суммарное время запаздывания ответного сигнала РМ по отношении к запросному сигналу СД; r - расстояние между ВС и РМ; с - скорость распространение радиоволн;. Tк з- кодовый интервал запроса; Tк.о - - // - // - ответа; t0 - постоянное время задержки запросного сигнала в наземном РМ.
Так как Tк.з + t0 + Tк.о = const - то измеренное время t З будет пропорционально расстоянию между ВС и РМ. Результаты измерения в ИУ преобразуются в показания индикаторов дальности ИСД.
|
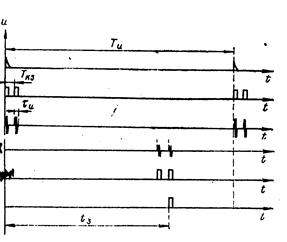


 . После приема этого сигнала наземным радиомаяком он обрабатывается последним и излучается на частоте f отв. в сторону ВС. Ответный сигнал также кодируется в РМ и имеет свой ответный код Т к.о. Принятый антенной (А) ответный сигнал поступает на вход приемника дальномера, усиливается, детектируется. На выходе ПРМ образуется низкочастотный сигнал в виде огибающей двухимпульсного кода ответа. Этот сигнал поступает на декодирующее устройство (ДУ), на выходе которого формируется импульс ответа. Этот импульс поступает на измерительное устройство и останавливает работу измерительной схемы, которая измерит время t З от момента начала своей работы (излучение запроса) до момента получение ответа. Это время
. После приема этого сигнала наземным радиомаяком он обрабатывается последним и излучается на частоте f отв. в сторону ВС. Ответный сигнал также кодируется в РМ и имеет свой ответный код Т к.о. Принятый антенной (А) ответный сигнал поступает на вход приемника дальномера, усиливается, детектируется. На выходе ПРМ образуется низкочастотный сигнал в виде огибающей двухимпульсного кода ответа. Этот сигнал поступает на декодирующее устройство (ДУ), на выходе которого формируется импульс ответа. Этот импульс поступает на измерительное устройство и останавливает работу измерительной схемы, которая измерит время t З от момента начала своей работы (излучение запроса) до момента получение ответа. Это время




