
Проектирование манипуляторов лесных машин. Разработка компоновочно-кинематической схемы манипулятора
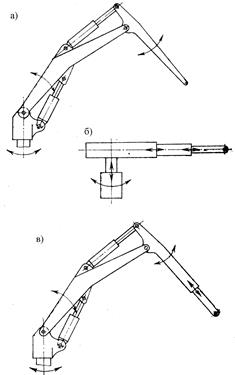
Манипулятор предназначен для перемещения рабочего органа лесной машины в соответствии с заданным технологическим процессом. В зависимости от компоновочно-кинематической схемы различают манипуляторы шарнирно-сочлененные (рисунок Д.1 а), телескопические (рисунок Д.1 б) и комбинированные (рисунок Д.1 в).
Рисунок Д.1 – Компоновочно-кинематические схемы манипуляторов
Шарнирно-сочлененные манипуляторы проще по устройству, надежнее в работе, лучше, чем телескопические, воспринимают изгибающий, и в особенности, крутящий моменты. Телескопические манипуляторы имеют меньшие габаритные размеры по высоте, вследствие чего они могут работать в крытых помещениях, под пологом леса и в других местах с ограничением рабочих зон по высоте. Комбинированные манипуляторы содержат как шарнирно-сочлененные, так и телескопические звенья. Основным достоинством комбинированной схемы манипулятора является расширение рабочего пространства при ограниченных размерах стрелы манипулятора. В частности, если рукоять шарнирно-сочлененного манипулятора дополнить телескопическим звеном, то при одной и той же длине стрелы получим больший вылет манипулятора. Манипулятор устанавливается на базовой машине (тракторе или автомобиле) и несет на себе рабочий орган, подвешиваемый на конце рукояти. Манипулятор может устанавливаться вместе с кабиной на поворотной платформе, посредством поворотной опоры, размещенной на кабине и посредством поворотной опоры (обычно поворотной колонны), размещенной за кабиной или сбоку от кабины. Достоинством первых двух способов компоновки манипулятора является отсутствие ограничения на поворотливость вокруг вертикальной оси. Манипулятор в этих случаях может обслуживать рабочую зону в телесном угле 360º, т. е. обеспечивается круговая зона. Недостатком компоновки манипулятора вместе с кабиной или над кабиной является сложность конструкции, приводящая в конечном счете к утяжелению машины. При размещении манипулятора над кабиной требуется либо усиливать жесткость и прочность кабины, либо устанавливать тяжелый каркас. Поворотная же платформа сама по себе представляет массивное металлоемкое устройство. Размещение манипулятора сбоку или сзади по отношению к кабине на опорной ферме вместе с поворотной колонной значительно проще в конструктивном отношении, меньше получается и общая масса машины. Однако эти преимущества обеспечиваются ценой утраты полноповоротливости вокруг вертикальной оси. Наличие хотя бы и небольших мертвых зон делает манипулятор менее универсальным. В отдельных случаях такое ограничение по поворотливости недопустимо. Например, при проходе просеки необходимо деревья брать спереди и переносить их для пакетирования в заднюю полусферу. Для валочно-трелевочной машины отсутствие полноповоротливости не является существенным недостатком. Не требуется полноповоротливости манипулятора и для сортиментовозов.
Рисунок Д.2 – К графическому определению длин стрелы и рукояти Разработка компоновочно-кинематической схемы начинается с привязки места установки манипулятора к трактору или автомобилю. При этом достаточно в системе координат, связанной с базовой машиной, определить точку пересечения оси шарнира стрелы с осью вращения поворотной колонны (рисунок Д.2). Сам манипулятор характеризуется максимальным вылетом L, длиной стрелы lс и длиной рукояти lр. Кроме того, для компоновки манипулятора на заданной базе трактора необходимо знать высоту рабочего органа hз, а также максимально допустимую высоту пачки деревьев в конике над уровнем земли hп. Исходными данными при разработке компоновочно-кинематической схемы манипулятора являются две величины: максимальный вылет и максимально допустимая высота пачки hп. Конечным результатом компоновки является определение длины стрелы и рукояти, а также точки сопряжения стрелы с поворотной опорой. Методика расчета lс, lр основывается на следующих предпосылках. Теоретически максимальный вылет достигается раскладыванием стрелы и рукояти в линию (рисунок 5.2). Однако технически такое сочленение рукояти со стрелой осуществить очень сложно и поэтому угол между рукоятью и стрелой должен быть меньше 180º. Это требование будет выполнено, если теоретически возможный вылет принять равным 1,05L. Тогда заданный вылет манипулятора будет обеспечиваться при угле ψ; порядка 150º. Вторая предпосылка основывается на том, что укладывание дерева в коник происходит после срезания, то есть при захвате за комель. Поскольку комель деревьев должен укладываться в промежутке между коником и поворотной колонной, то в момент укладывания рукоять будет иметь минимальный угол по отношению к стреле, а сами стрела и рукоять будут близки к вертикальному положению с точностью, когда косинусы углов между стрелой и вертикалью, рукоятью и вертикалью можно принять равными единице. При принятых предпосылках справедливо следующее приближенное равенство:
Синус угла β; выразим через косинус β;:
Итак, имеем следующее уравнение:
Поскольку последнее уравнение содержит две неизвестные величины lс и lр, то необходимо добавить к нему какую-нибудь связь между длинами стрелы и рукояти. Соотношение В таблице Д.1 приведены расчетные значения значения lс и lр, при
Таблица Д.1 – Расчетные значения длины стрелы и рукояти при μ = 1,25
Из таблицы Д.1 видно, что предельная высота пачки hп слабо влияет на размеры манипулятора. Поэтому при проектировании манипуляторов достаточно принять ориентировочное значение высоты hп взятое, например, по прототипу. Основным параметром, сильно влияющим на размер манипулятора, является максимальный вылет. Компоновочная схема манипулятора разрабатывается на основе кинематической схемы и представляет собой схему сочленения тел, обладающих определенными размерами. Компоновочная схема разрабатывается минимум для двух крайних положений манипулятора (в положении максимального вылета и в положении ЗСУ над пачкой деревьев в конике). При этом решается задача подбора рабочих ходов штоков гидроцилиндров и выбор положения шарниров сопряжения рукояти со стрелой и стрелы с поворотной колонной. Компоновка гидроцилиндров осуществляется путем вычерчивания контуров стрелы и рукояти в указанных выше двух крайних положениях. Если заданы расстояния между проушинами гидроцилиндра lmax, lmin, а следовательно, задан ход штока lmax – lmin, то под этот ход штока необходимо выбрать места сопряжения гидроцилиндров с поворотной опорой, стрелой и рукоятью. Выбор точек сочленения гидроцилиндров с опорол и с управляемым звеном представляет собой достаточно сложную задачу проектирования, не имеющую единственного решения. В связи с этим возникает проблема оптимизации размещения гидроцилиндров, которая формулируется следующим образом. Пусть заданы предельные отклонения стрелы (манипулятора), которые необходимо обеспечить с помощью гидроцилиндров, и заданы линейные размеры гидроцилиндров при крайних положениях штока. Кроме того, заданы фактические размеры поворотной колонны, стрелы и рукояти и заданы ограничения на положения осей шарниров относительно колонны, стрелы и рукояти. Требуется выбрать такую компоновку гидроцилиндров, при которой будут обеспечиваться максимальные плечи сил Ргц в позиции манипулятора, отвечающей максимальной нагрузке. Возможны и иные постановки задачи оптимизации компоновки гидроцилиндров со стрелой и рукоятью. Нагрузка манипулятора определяется собственно силами тяжести стрелы, рукояти и рабочего органа и силами взаимодействия рабочего органа с деревом. В качестве расчетного случая нагружения манипулятора принимаем подъем дерева за комель на максимальном вылете с добавлением некоторого крутящего момента, передаваемого стреле. Крутящий момент возникает главным образом из-за отклонения вектора сил тяжести дерева вместе с ЗСУ от плоскости манипулятора, обусловленного микроповышениями и уклоном поверхности стоянки трактора. Усилия, воспринимаемые манипулятором от дерева, определяются для дерева максимального диаметра. При этом ускорение подъема дерева принимается равным нулю, а инерционные нагрузки учитываются введением поправочного коэффициента. Что касается сил тяжести, то ими необходимо задаться с последующим уточнением после поверочных расчетов прочности. При определении нагрузки манипуляторов машин типа ТБ-1, ЛП-18 рекомендуется принять:
Первые значения массы относятся к ТБ-1, ЛП-17, вторые – к ЛП-18, ЛП-49. Принимаем приближенно, что силы тяжести стрелы и рукояти приложены на расстоянии 1/3 их длины от оси вращения. Расчетную схему сил изображаем на компоновочной схеме, вычерченной в определенном масштабе. Из чертежа непосредственно находим плечи сил, входящих в уравнения равновесия рукояти и стрелы вместе с рукоятью. Уравнение равновесия рукояти запишем при условии, что гидроцилиндр управления рукоятью заперт и работает как нерастяжимый невесомый стержень. Пусть Рр – реакция стержня (гидроцилиндра). Тогда уравнение равновесия рукояти запишется в следующем виде:
Отсюда неизвестная сила реакции Рр найдется по формуле
где Q – равнодействующая сил тяжести в захвате:
Уравнение равновесия стрелы запишем при условии, что усилие на штоке гидроцилиндра уравновешивается силами давления жидкости на поршень гидроцилиндра
Отсюда уравновешивающее усилие, создаваемое гидроцилиндром стрелы найдется по формуле
|

 .
. .
. .
. для лесных машин типа ТБ-1, ЛП-49 составляет μ = 1,2 ÷ 1,3.
для лесных машин типа ТБ-1, ЛП-49 составляет μ = 1,2 ÷ 1,3. .
. ,
, .
. .
. .
.


