
Сложность системы
В реальной жизни категория «сложность» обычно оценивается интуитивно — сложное или простое дело, сложный или простой вопрос. Естественно, что такие заключения опираются на субъективные оценки людей, которые, впрочем, делают это в простых ситуациях совсем неплохо. Однако, когда мы имеем дело не с бытовыми ситуациями, а с реальной экономикой, рынком, взаимно противоречивыми интересами и когда ценой решения являются получаемая прибыль, возможность реализации проекта или даже стабильность финансовой системы, то интуитивных оценок сложности систем оказывается недостаточно. Если сложную систему моделировать простой моделью, то, как правило, эффективность такой модели или незначительна или даже отрицательна. Поэтому попытаемся оценить сложность системы и научиться сравнивать системы по их сложности. О сложности рассматриваемого объекта можно говорить, если он отнесен по своему уровню к организации, системе или структуре. Объекты отличаются друг от друга по степени сложности. Для того чтобы различать сложность того или иного объекта, вводится понятие «уровень сложности». Он может быть выражен через количество разнообразия, т.е. количество элементов того или иного вида, их связей и взаимосвязей, «отношений порядка» между ними. При таком подходе можно утверждать, что каждый сложный объект обладает определенным разнообразием, а уровень сложности характеризуется числом элементов любой природы, входящих в объект. Например, если в качестве сложного объекта взять организацию, то ее разнообразие можно определить числом условно неделимых составляющих частей данной организации, числом «отношений порядка» и связей между ними. Если мы увеличим число условно недели-
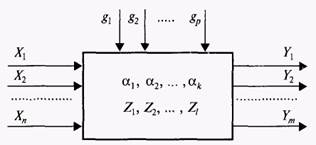
Управление системами. Качество управления системой Под управлением системой будем понимать процесс, ориентирующий некоторую систему на достижение определенной цели.Существует два содержания понятия управления: управление как управленческая деятельность и управление как процесс. При рассмотрении управления как управленческой деятельности обычно имеют место объект управления и управляющий орган. Управленческая деятельность управляющего органа при этом сводится к выбору цели управления, методов и средств ее достижения, постановке задач управления, выбору исполнителей, постоянному контролю. Понятие управления как управленческой деятельности состоит в отношении субъекта к объекту управления. Так, например, директор предприятия, осуществляя управленческую деятельность, должен хорошо знать экономику, технику, технологию производства, людей, с которыми работает, должен ясно представлять перспективные цели и цели на отдельных этапах, знать законы. Управление как процесс рассматривается независимо от конкретных характеристик объекта и субъекта. В этом случае управление сводится к определению параметров процесса управления и исследованию структурных особенностей процесса, последовательности его этапов. При такой трактовке управления обычно выделяют управляющую и управляемую подсистемы. Понятие управления как процесса дает возможность управлять, не познавая полностью объект управления. Например, можно, не зная устройство автомобиля, научиться им управлять; можно настроить телевизор, не имея представления о его конструкции. Здесь налицо функциональный подход к управлению. Различие двух понятий управления наглядно проявляется при принятии решений. Если управление рассматривается как процесс, то принятие решения сводится к выбору одного из вариантов управления, оптимального по заранее заданному критерию. Критерий в данном случае не является предметом принятия решения. При рассмотрении управления как управленческой деятельности субъект управления должен сам вырабатывать критерии и цели управления, корректировать их в процессе управления. В этом смысле управление как деятельность — более широкое понятие, чем управление как процесс. Управленческая деятельность в целом гораздо менее формализуемое явление. При экономико-математическом моделировании используются оба понятия управления, так как объекты исследования — социально-экономические системы. Однако применение конкретных математических методов возможно только для объектов, имеющих определенную, заранее заданную цель функционирования. Экономико-математическое моделирование не занимается выработкой целей экономических объектов. Это дело политической экономии и конкретных экономических наук. Экономико-математические методы определяют наилучшие пути управления системой в направлении достижения заданной цели. Таким образом, управление при экономико-математическом моделировании следует понимать как управление процессами. Управление в виде управленческой деятельности тоже присутствует в социально-экономических системах, так как они содержат человеческие коллективы, вырабатывающие цели, как подсистемы. Но эти коллективы, или подсистемы субъектов, отражающие объективную реальность и вырабатывающие определенные суждения и цели функционирования социально-экономических систем, базируются в своей деятельности на принципиально иных категориях и поэтому не могут быть полностью формализованы в виде экономико-математических моделей. Модель социально-экономического объекта, способного вырабатывать и корректировать цели своего функционирования, можно представить как обычную систему с дополнительными управляющими входами (рис. 9.5). Управляющие входы g1,g2,—,gp предназначены для изменения цели функционирования системы, которое может произойти только из внешней для данной системы среды.
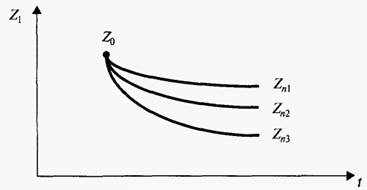
Рис. 9.5. Модель системы с корректируемыми целями Всякое управление в таких системах осуществляется как информационный процесс: получение, обработка и передача информации. Изменение состояния системы в результате управления происходит на основе получения информации (приход входных сигналов) и является реакцией на команду, которая вырабатывается в системе после анализа информации, содержащейся во входном сигнале. Изменение состояния системы в результате управления показано на рис. 9.6. Здесь Zo — исходное состояние системы, a ZnV Zn2, 2пЪ — новые состояния системы, полученные при различной интенсивности управляющего сигнала. Управление системой неразрывно связано с понятием цели управления системой или просто цели системы. Под целью управления системой понимают желаемое значение ее выходов при условии, что выходы в достаточной мере отражают состояние системы. Цель — это своеобразный эталон функционирования системы. При моделировании цель системы представляется в виде целевой функции, т.е. математического выражения связей входов и выходов системы друг с другом, отражающих поведение системы с точки зрения целевой установки.
Рис. 9.6. Изменение состояния системы при различной интенсивности управляющего сигнала Понятие цели системы — идеализированное понятие. Обычно выходные сигналы или состояния системы находятся вблизи целевых значений или колеблются около них. Чтобы оценить степень приближения системы к ее цели, вводят понятие критерия достижения цели или критерия цели. Критерием цели назовем правило, позволяющее оценить фактическое поведение системы (состояние входов, значение целевой функции) по сравнению с желаемым (целевым) поведением и зафиксировать достаточность или недостаточность этой оценки. По критерию цели отбирают вариант поведения системы (оптимальный вариант), наиболее отвечающий значению цели системы. Обычно критерии задают в виде минимума (максимума) целевой функции или значений выходов системы, однако это всего лишь частный случай. Существует большое число математических имитационных методов, где существенно расширен круг способов задания целевых функций и критериев целей. Построение целевых функций систем — одна из важнейших задач экономико-математического моделирования. Рассмотрим основные принципиальные положения определения целевых функций систем. Принцип однозначности требует наличия одной-единственной целевой функции для системы. Если в системе имеется несколько частных целевых функций, то их следует объединить в одну посредством какой-либо комбинации, например
где А — обобщенная целевая функция системы; К — коэффициенты относительной важности частных целевых функций. Принцип управляемости выражает необходимость зависимости целевой функции от параметров управления системой (входных сигналов). Принцип подходящей формы заключается в установлении такой формы целевой функции, при которой она имела бы практический смысл, т.е. задавала бы экстремальность, попадание в определенный интервал, какие-нибудь другие требования к показателям, а также была однозначной. В практических задачах встречаются различные типы целевых функций. Рассмотрим наиболее употребляемые. Целевую функцию прибыли обычно задают в следующем виде:
где Uj — цена /-го вида продукции; Vj — объем выпуска г'-го вида продукции; Cj — стоимость единицы у-го типа ресурса, пошедшего на изготовление продукции; Pj— потребная величина j-то типа ресурса. Данная целевая функция направлена на обеспечение максимальной положительной разницы между объемом реализованной продукции и величиной затрат ресурсов, пошедших на ее изготовление, т.е. на получение максимальной прибыли. Целевая функция себестоимости имеет вид
где Хк — фактор, влияющий на себестоимость. Эта целевая функция отражает стоимость, связанную с процесом производства. Обычно под переменными Хк понимают стоимость факторов, поддающихся управлению (стоимость материалов, топлива и т.п.), а функцию F минимизируют. Целевую функцию качества некоторого процесса задают в виде квадратичной формы
где Yj ~ положительный весовой коэффициенту-го параметра; 1} — требуемое значение качества у'-го параметра; Yj — фактическое значение качества у-го параметра. Целевая функция качества обеспечивает минимизацию взвешенной суммы квадратов отклонений всех параметров от их требуемых значений. Целевая функция времени выражает стремление минимизировать время протекания процесса между двумя фиксированными граничными условиями и может быть записана в следующем виде:
Понятие обратной связи. Оно лежит в основе большинства процессов управления и является фундаментальным. Что такое обратная связь? В формальном представлении с позиции системы обратная связь означает получение информации о результате управления. Выходной сигнал системы, несущий информацию о ее состоянии, должен поступить на вход системы. На рис, 9.7 представлена модель системы с обратной связью через некоторый управляющий орган УО.
Рис. 9.7. Модель системы с обратной связью Приведем несколько примеров систем с обратной связью. Чтобы взять какой-либо предмет, человек протягивает руку, глазами следит за ее положением в пространстве и непрерывно управляет движением руки относительно предмета, исправляя ошибки движения руки к предмету. Здесь налицо система «человек — предмет», зрительная обратная связь: «глаза — рука (через управляющий орган — мозг)», В качестве системы с обратной связью можно представить процессы производства товаров и услуг на некоторый рынок, через величину спроса регулирующий необходимую величину производства товаров или оказания услуг. Обратная связь в системах может быть отрицательной и положительной. Отрицательная обратная связь характеризуется тем, что выходной сигнал, воздействующий на вход системы, имеет противоположный знак по отношению к входному, вызвавшему изменение состояния системы. Тем самым он нейтрализует в определенной степени входной сигнал. Системы с отрицательной обратной связью обычно предназначены для поддержания ее в устойчивом состоянии. Так, например, при поддержании постоянного уровня производства и потребления используются различные механизмы отрицательной обратной связи. Положительная обратная связь характеризуется тем, что выходной сигнал, подаваемый в качестве обратной связи на вход, имеет одинаковый знак с входным сигналом и усиливает действие входного сигнала. Системы с положительной обратной связью неустойчивы и обычно находятся в стадиях развития или гибели. Типы управления. В практике встречается несколько типов управления системами: жесткое (без обратной связи), с обратной связью, адаптивное. Жесткое управление,или управление без обратной связи, является простейшим. При нем система полностью зависит от программы изменения входного управляющего сигнала. Такой вид управления применяется, когда изменения выходного сигнала в зависимости от входного известны и действие помех на систему не приводит к существенным искажениям ее выходных характеристик. Примерами жесткого управления можно назвать управление токарным станком, управление автомобильным движением при помощи светофора, работу ЭВМ по заданной программе и пр. Управление с обратной связью — наиболее распространенный тип управления — рассмотрено выше. Адаптивное управление также является управлением с обратной связью и отличается от последнего наличием специального адаптивного (приспособительного) механизма, накапливающего и анализирующего информацию о прошлых управленческих ситуациях, вырабатывающего новое поведение на основе прошлого опыта в соответствии с заложенными целями и критериями. Адаптивное управление присуще сложным системам, которым в процессе функционирования приходится изменять программы и стратегии поведения путем обучения. Теория адаптивного управления пока не получила большого развития, как, например, теория систем с обратной связью, вследствие чрезвычайной сложности формирования принципов обучения. Мы рассмотрели наиболее важные понятия и идеи, используемые при моделировании применительно к социально-экономическим объектам. Заметим, что категории «организация», «система», «структура» и связанные с ними понятия легко поддаются формальному математическому описанию. Рассмотренные выше понятия позволяют ввести оценку качества управления. Ее легко сопоставить по аналогии с качеством вождения автомобиля. Опытный водитель и «чайник» ведут автомобиль по-разному, с различным качеством. Под качеством здесь понимаются безопасность, комфорт, скорость движения, расход бензина и т.п. В данном случае будем рассматривать качество управления системой с точки зрения ее эффективности и устойчивости. Под эффективностью понимается степень достижения поставленной цели с учетом заданных критериев ее достижения. Понятие целевых функций и критериев достижения целей были даны выше (см. с. 29—30), поэтому укажем только на особенности введения целевых функций в имитационные модели. Для каждого элемента модели может быть определена целевая функция с учетом критерия ее достижения. Например, целевая функция элемента, поддерживающего уровень запаса бензина на рынке автомобильного топлива, может быть выбрана в виде определенной нормативной величины, а критерий ее достижения задан интервалом, центр которого и есть нормативная величина запаса. В целом для системы может быть выбран один из способов формирования единой целевой функции, а также модель допустимого компромисса или выбор оптимального решения по ряду ранжированных по убыванию важности целевых функций. Рассмотрим понятие устойчивости системы. Устойчивость системы будем трактовать как способность системы переходить из одного состояния равновесия в другое в случае воздействия на нее извне или внутренних изменений. На рис. 9.8 показано поведение двух систем — устойчивой А и неустойчивой Б.
Рис. 9.8. Область устойчивости систем А и Б Пусть системы А и Б имеют состояния ZA и ZB соответственно. В моменты времени tx—t-, приходят входные воздействия (сигналы), переводящие состояние системы в новое значение. Контурной линией показана область устойчивых значений состояния систем. Выход значения состояния из данной области значений говорит о том, что система становится неустойчивой. В данном примере система Б неустойчива, так как после прохождения точки t4 выходит из области устойчивости. Понятие устойчивости связано с величиной воздействия или сигнала, вызвавшего изменения состояния системы. Поэтому, говоря об устойчивости системы, следует учитывать предельные отклонения воздействующего сигнала или внутреннего изменения системы, сопоставляя его с изменением состояния последней. Если входные воздействия обозначить через "Я", то для устойчивой системы можно записать следующее: при а для неустойчивых систем: при где Xmin, Xmax — соответственно минимально и максимально возможные изменения воздействия, т.е. сигнала или внутреннего изменения в системе; Zmin, Zmax — соответственно минимально и максимально возможные изменения состояния систем, не выходящие из области устойчивости последних. Если Z— состояние системы, то величины,
будем называть запасом устойчивости системы. При наличии в системе нескольких параметров состояния, т.е. при наличии пространства состояний ловия устойчивости выполнялись для каждой составляющей состояния Выбор значений Zmin и Zmax имеет весьма существенное значение для качества управления, так как он влияет на устойчивость системы. В экономических системах при их имитационном моделировании выбор Zmin и Zmax сложен и может быть осуществлен только специалистами по конкретному объекту или процессу при помощи экспертного анализа. Запасы устойчивости AZследует выбирать исходя из наличия случайных или враждебных для системы возмущений с учетом заданной или доверительной вероятности случайного или враждебного возмущения. В общем случае устойчивость системы будем характеризовать некоторым функционалом U(Z, Zmin, Zmax, 0), где 9 — оценка надежности системы. В заключение заметим, что вопросы управления и качества управления системой возникают для систем с обратной связью,причем с отрицательной обратной связью,т.е. когда реакция системы или ее выходной сигнал анализируются системой и сопоставляются с желаемым или целевым значением реакции или выходного сигнала. Величина отклонения от желаемого значения должна поступить на вход системы для уменьшения этого отклонения до допустимой ошибки. Поэтому каждый элемент системы, группу элементов или все элементы системы целесообразно замыкать обратной связью, чтобы сопоставлять значения выходного сигнала (реакции системы) со значениями, заданными целевой функцией.
|






 значения
значения 
 ,
, , т. е.
, т. е.
 , необходимо, чтобы ус-
, необходимо, чтобы ус- . Если хотя бы для одного значения Z, условия устойчивости не выполняются, то система неустойчива в целом. Для устойчивых систем имеют место устойчивые переходные процессы (см. рис. 9.4).
. Если хотя бы для одного значения Z, условия устойчивости не выполняются, то система неустойчива в целом. Для устойчивых систем имеют место устойчивые переходные процессы (см. рис. 9.4).


