
ЭЛЕКТРОДВИГАТЕЛИ ПОСТОЯННОГО ТОКА.
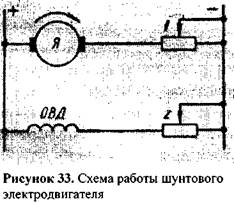
Электродвигатели постоянного тока с параллельным возбуждением (шунто-вые) получили широкое применение для привода тяжелых станков. Их включают по схеме, показанной на рисунке 33. Обмотка якоря Я подключена к сети через пусковой реостат 1, а обмотка возбуждения ОВД- через реостат 2, служащий для изменения частоты вращения. Для электродвигателей постоянного тока момент на валу электродвигателя и частота вращения
где k=0,05 -^0,12 - коэффициент пропорциональности; 1Я - сила тока в цепи якоря, A; U - напряжение сети, В; Ф - магнитный электрический поток электродвигателя, Вб; гя - сопротивление цепи якоря, Ом; с - постоянная данного электродвигателя.
Механические характеристики электродвигателя приведены на рисунке 34. Цифрой 1 обозначена линия, соответствующая естественной механической характеристике. Относительно малая величина сопротивления обмотки якоря обуславливает достаточную жесткость естественной характеристики электродвигателя с параллельным возбуждением. На рисунке 34 это отражено небольшим наклоном линии 1. Во время работы электродвигателя можно увеличить сопротивление реостата 1', тогда общее сопротивление цепи якоря возрастает (наклон линии - характеристики увеличится). Таким образом, получают ряд искусственных реостатных характеристик 2, 3, 4. Потери мощности в цепи возбуждения зависят от мощности электродвигателя. Номинальный ток якоря определяется как разность номинальных значений электрического тока электродвигателя и тока возбуждения. Однако ток возбуждения электродвигателя параллельного возбуждения мал, и в расчетах его часто не учитывают. Шунтовые электродвигатели кратковременно могут работать с перегрузкой. Коэффициент допустимой перегрузки Я = 2-н2,5. Величина допустимой кратковре-. менной перегрузки ограничивается появлением значительного искрения под щетками. На рисунке 52 штриховой линией 9 показана механическая характеристика, соответствующая измененной полярности якоря электродвигателя, при которой изменяется направления действия момента в двигательном режиме.
Регулирование частоты вращения электродвигателей постоянного тока можно производить тремя способами: изменением сопротивления в цепи якоря, изменением подводимого к электродвигателю напряжения и магнитного потока, первый способ малоэко- номичен и применяется редко. Регулирование скорости изменением магнитного потока является наиболее распространенным. Величина потока изменяется реостатом 2' (рисунок 34). Увеличивая его сопротивление, уменьшают ток возбуждения и магнитный поток, что приводит к увеличению частоты вращения. При этом возрастают как скорость холостого хода, так и угловой коэффициент. Таким образом, при уменьшении магнитного потока механические характеристики представляют собой ряд прямых линий (5, 6, 7, 8), не параллельных естественной характеристике и имеющих тем больший наклон, чем меньше потокам они соответствуют. Число их зависит от количества секций на реостате Т'. При большом числе секций на регулировочном реостате частота вращения практически регулируется бесступенчато. Регулирование частоты вращения изменением подводимого напряжения требует применения специальных схем и используется в системах генератор - электродвигатель. Торможение электродвигателей постоянного тока производится теми жн способами, что и торможение асинхронных электродвигателей. Торможение с рекуперацией осуществляется шунтовым реостатом, которым снижают скорость якоря до минимума. При этом электродвигатель работает в режиме генератора, отдающего электрический ток в сеть. Окончательную установку производят отключением электродвигателя от сети. При торможении электродинамическим способом, получившим наибольшее распространение, якорь электродвигателя отключают от сети и замыкают на нагрузочное сопротивление, а электрический ток включают через тормозной реостат.. Торможение противотоком производится изменением направления электрического тока в цепи якоря.
|
 Пуск двигателя с параллельным возбуждением производят только с помощью пускового реостата. Реостат 1' (рисунок 34) при пуске включается полностью всеми ступенями, тем самым разгоняя электродвигатель по характеристике 4. Сопротивления рассчитывают так, чтобы электродвигатель при включении развивал заранее заданный момент mi (обычно mi =2MH). При разгоне электродвигателя, когда момент уменьшается до заранее принятого значения М2 (М2 =МН), одну секцию реостата отключают. Электродвигатель при той же скорости переходит на работу по характеристике 3. Секции реостата постепенно отключают, пока электродвигатель не перейдет на работу по естественной механической характеристике. Пуск электродвигатель постоянного тока в станках производится автоматически.
Пуск двигателя с параллельным возбуждением производят только с помощью пускового реостата. Реостат 1' (рисунок 34) при пуске включается полностью всеми ступенями, тем самым разгоняя электродвигатель по характеристике 4. Сопротивления рассчитывают так, чтобы электродвигатель при включении развивал заранее заданный момент mi (обычно mi =2MH). При разгоне электродвигателя, когда момент уменьшается до заранее принятого значения М2 (М2 =МН), одну секцию реостата отключают. Электродвигатель при той же скорости переходит на работу по характеристике 3. Секции реостата постепенно отключают, пока электродвигатель не перейдет на работу по естественной механической характеристике. Пуск электродвигатель постоянного тока в станках производится автоматически.


