АСИНХРОННЫЕ ЭЛЕКТРОДВИГАТЕЛИ
Подавляющее большинство металлорежущих станков приводится в движение асинхронными электродвигателями трехфазного тока. Они отличаются простотой, надежностью и малой стоимостью.
Конструктивные формы асинхронных электродвигателей определяются способом их крепления и формой защиты от воздействия окружающей среды. Электродвигатель нормального исполнения на лапах показан на рисунке 29, а. Широко применяют фланцевые электродвигатели (рисунок 29, б) для горизонтальной и вертикальной установок. Пример встроенного электродвигателя приведен на рисунке 30. В этом случае валом электродвигателя служит один из валов станка (часто шпиндель). Применяемые в станках электродвигатели имеют различные формы защиты от воздействия окружающей среды. Для предотвращения внутрь электродвигателя посторонних предметов, а также для соблюдения техники безопасности электродвигатели имеют решетки. У некоторых электродвигателей делают вентиляционные отверстия, обращенные к низу или расположенные в вертикальных плоскостях, для защиты от попадания жидкости. Ряд электродвигателей изготавливают без вентиляционных отверстий, т.е. закрытыми. Однако они имеют тот недостаток, что вследствие плохого охлаждения их мощность значительно меньше, чем мощность электродвигателей с защитными устройствами таких же размеров. Выпускают закрытые обдуваемые электродвигатели, у которых имеется наружный вентилятор, закрытый клапаном, прикрывающий конец вала электродвигателя, противоположный шкиву. Обдуваемые электродвигатели наиболее часто применяют в станках.
Рисунок 30. Встроенный электродвигатель шлифовального станка Электродвигатели рассчитаны на напряжение 127, 220 и 380 В. один и тот же электродвигатель можно включать в сети с разными напряжениями, отличающимися в л/3 раз, например, в сети с напряжением 127 и 220, 220 и 380 В. При этом для меньшего из этих двух напряжений статор электродвигателя включают треугольником, для большего - звездой. Ток в фазовых обмотках электродвигателя в обоих случаях будет при таком включении один и тот же. Кроме того, выпускают электродвигатель на 500 В. Обмотка статора электродвигателей для напряжения 500 В включается на постоянное соединение звездой.
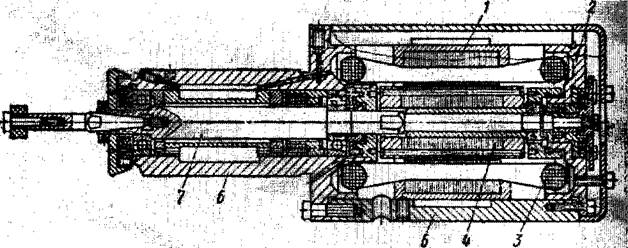
Рисунок 31. Электрошпиндель на подшипниках качения: 1 - пакет статорного железа; 2 - задний щит; 3 - обмотка статора; 4 - пакет жести ротора; 5 - корпус; 6 - передний щит; 7 - шпиндель Асинхронные электродвигатели с короткозамкнутым ротором выпускают с номинальной мощностью 0,6-100 кВт на синхронные частоты вращения 600, 700, 1000, 1500, 3000 об/мин. Частоту вращения асинхронного электродвигателя можно повысить, увеличив частоту переменного тока. При шлифовании отверстий малого диаметра для получения необходимой скорости резания нужны очень высокие частоты вращения шлифовальных шпинделей. Например, при шлифовании кругом диаметром до 3 мм со скоростью 30 м/с частота вращения шпинделя должна быть равна 200 000 об/мин. Для этих целей часто применяют так называемые электрошпиндели (рисунок 31). Электрошпиндель представляет собой шлифовальный шпиндель с встроенным асинхронным короткозамкнутым электродвигателем повышенной частоты. Широко используют электродвигатели на подшипниках с воздушной смазкой. Механическая характеристика электродвигателя - это зависимость частоты вращения п от момента М на его валу Электродвигатели бывают с мягкой, жесткой и абсолютно жесткой механической характеристикой. У электродвигателей с мягкой характеристикой изменение момента вызывает значительное изменение частоты вращения его вала. Если это изменение не влечет за собой заметного изменения частоты вращения, характеристика называется жесткой. При абсолютно жесткой характеристике частота вращения электродвигателя не зависит от нагрузки. Механическая характеристика электродвигателя характеризуется скольжением s, которое выражает относительное снижение частоты вращения электродвигателя при переходе от холостого хода (М=0) к наибольшей (критической) нагрузке (М=МК):
где п0 - скорость вращения магнитного поля (синхронная частота вращения электродвигателя), 1/с и об/мин; п - частота вращения ротора (асинхронная). Скольжение электродвигателя выражается в процентах или долях единицы.
где Мк - критический (наибольший нагрузочный) момент электродвигателя; sk -критическое скольжение, соответствующее моменту Мк.
На рисунке 32 показаны механические характеристики асинхронного электродвигателя, построенные по формуле крутящего момента. При п=п0 момент М=0. Этот случай синхронного вращения соответствует идеальному холостому ходу машины. В первый момент пуска электродвигателя, когда ротор еще неподвижен и s=l, электродвигатель развивает пусковой (начальный) момент Мп, который больше номинального момента Мн. Значения Мк и sk определяют критическую точку (максимум) механической характеристики. Участок характеристики от точки идеального холостого хода до критической точки называют рабочей частью механической характеристики. Только на этом участке возможна устойчивая работа асинхронного электродвигателя при моменте нагрузки, независящем от скорости вращения (как это обычно имеет место в ме- таллорежущих станках). Величина номинального скольжения зависит от номинальной мощности, типа электродвигателя и находится в пределах 0,02-0,12; при этом электродвигатели большей мощности имеют меньшую величину скольжения. Кроме асинхронных электродвигателей нормального исполнения выпускают электродвигатели с повышенным скольжением (0,07-0,16) и пусковым моментом. Электродвигатели с нормальным скольжением имеют жесткую характеристику и применяются в большинстве станков, а электродвигатели, с повышенным скольжением имеют мягкую характеристику и применяются в приводах станков с частым включением электродвигателя и значительной нагрузкой при пуске. На рисунке 32 кривая 1 соответствует электродвигателю с жесткой характеристикой, а кривая 2 -с мягкой. При прочих равных условиях электродвигатель с мягкой характеристикой имеет меньшую номинальную частоту и больший пусковой момент Мп. На рисунке 32 точка А соответствует номинальной нагрузке. В каталогах обычно приводят основные данные асинхронных двигателей: номинальная мощность на валу NH, кВт; номинальная частота вращения п, об/мин;
Кратность критическогомомента - это величина, определяющая допустимую механическую перегрузку электродвигателя Величина критического момента зависит от напряжения сети. Так как напряжение может колебаться, то наибольший допустимый момент перегрузки обычно принимают 0,85 Мк. Кратность пускового момента у короткозамкнутых асинхронных двигателей Пуск асинхронных двигателей. При пуске асинхронных двигателей с короткозамкнутым ротором пусковой электрический ток превышает номинальный в 4 - 8 раз. Толчок пускового электрического тока вызывает в сети понижение напряжения. Если при пуске электродвигателя большой мощности напряжение значительно понизится, то уменьшится его пусковой момент, а другие электродвигатели, работающие в это время с перегрузкой, могут остановиться (перейти в режим короткого замыкания). Поэтому асинхронный электродвигатель можно пускать без применения средств, ограничивающих пусковой электрический ток, лишь в том случае, когда номинальная мощность электродвигателя составляет не более 25% мощности трансформаторов, питающих сеть цеха. Асинхронные электродвигатели с фазовым ротором запускают с помощью реостата, включенного в це^&рупидование скорости вращения электродвигателей. Частота вращения ротора асинхронного короткозамкнутого электродвигателя
где f - частота переменного тока, Гц; р - число пар полюсов статора электродвигателя; s - скольжение ротора. Из формулы видно, что частоту вращения ротора можно регулировать изменением частоты электрического тока, скольжения или числа пар полюсов. Первым способом можно регулировать частоту вращения только при наличии отдельного генератора переменного тока для питания электродвигателя. Во всех остальных случаях частота переменного тока в сети является постоянной величиной. Регулирование частоты вращения путем изменения скольжения осуществляется введением активного сопротивления в цепь ротора, что возможно только у электродвигателей с фазовым ротором. Наиболее широкое применение в металлорежущих станках (особенно в многоскоростных электродвигателях) получил способ регулирования частоты вращения изменением числа пар полюсов. Торможение электродвигателей может производиться механическим или электрическим способами. К электрическим методам торможения относятся торможение с рекуперацией, электродинамическое торможений, торможение противотоком и др. Торможение с рекуперацией возможно только для многоскоростных электродвигателей. Сущность его заключается в том, что электродвигатель, оставаясь не отключенным от сети электрического тока, переключается на низшую скорость, в результате чего он переходит на генераторный режим и отдает в сеть электрическую энергию, благодаря чему электродвигатель тормозится и приближается к ре-, жиму переключенной низшей скорости. Дальнейшее торможение осуществляется механическим или другими способами. Электродинамическое торможение производится дополнительной подачей в обмотку статора постоянного тока, в результате чего в статоре возникает постоянное магнитное поле, которое тормозит вращающееся магнитное поле и останавливает электродвигатель. После полной остановки электродвигатель особым устройством автоматически отключается от сети. Торможение противотоком (противовключение) осуществляют переключением двух фаз обмотки статора. При этом меняется направление вращающегося магнитного поля, которое действует на вращающийся по инерции ротор и тормозит его. В конце торможения электродвигатель автоматически отключается от электрической сети. Этот способ имеет широкое применение в станках в силу его простоты и надежности. Реверсирование электродвигателей производят переключением любых двух внешних зажимов (фаз) электродвигателя.
|




 Момент асинхронного электродвигателя приближенно может быть определен по формуле
Момент асинхронного электродвигателя приближенно может быть определен по формуле
 синхронная частота вращения п0, об/мин; отношения(где Мн и Мп - со-
синхронная частота вращения п0, об/мин; отношения(где Мн и Мп - со- ответственно номинальный и пусковой моменты электродвигателя). Величина номинального момента
ответственно номинальный и пусковой моменты электродвигателя). Величина номинального момента
 бщепромышленного примененияЭлектродвигатели главного привода пускают без нагрузки, поэтому пусковой момент
бщепромышленного примененияЭлектродвигатели главного привода пускают без нагрузки, поэтому пусковой момент  достаточен. Для элек-тродвигателей, включаемых работу под нагрузкой, необходим большой пусковой момент.
достаточен. Для элек-тродвигателей, включаемых работу под нагрузкой, необходим большой пусковой момент.