ПОПЕРЕЧНО-СТРОГАЛЬНЫЙ СТАНОК 7Д37
Назначение станка - строгание плоских и фасонных поверхностей деталей в условиях единичного и серийного производства. Характеристика станка (рис. 101). Наибольший ход ползуна 1000 мм; наибольшее расстояние от опорной поверхности резца до станины (вылет) 1140 мм; наибольшее расстояние между верхней плоскостью стола и ползуном 500 мм; размер рабочей поверхности стола 560x1000 мм; наибольшее перемещение стола: горизонтальное 800 мм, вертикальное 420 мм; горизонтальная подача на двойной ход 0,2-5 мм; мощность электродвигателя главного движения 10кВт; габаритные размеры 3700x1850x1980 мм. Движения в станке. Главное движение - прямолинейное возвратно-поступательное движение ползуна с резцом. Оно осуществляется от гидропривода с двумя шиберными насосами. Гидропривод позволяет производить бесступенчатое регулирование скорости ползуна в пределах каждого из четырех имеющихся диапазонов скорости. Движение подачи - прерывистое поступательное перемещение стола с обрабатываемой заготовкой в поперечном или вертикальном направлении и прерывистое поступательное перемещение суппорта в вертикальном направлении. Вспомогательные движения - установочные перемещения стола и суппорта.
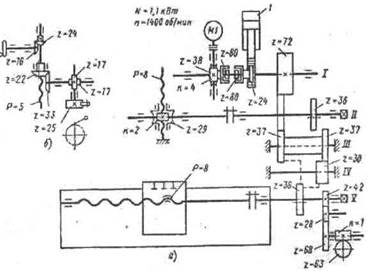
Прерывистая подача стола происходит в момент изменения направления движения стола с обратного хода на рабочий ход. В это время масло под давлением поступает в гидроцилиндр 1 6 - упор для привода механизма вертикальной подачи суппорта; 7,8 - упоры для переключения хода ползуна; 9 - ползун; 10 - станина (рис. 102, а). Поршень через шток с рейкой поворачивает зубчатое колесо z= = 24, от которого через храповой механизм z = 80 и ряд зубчатых передач вращение передается на винт поперечной или вертикальной подачи.
Рис. 102, Кинематическая схема станка 7Д37 О, 72 37 Винт поперечной подачи получает вращение от вала 1 через колеса —,— 30 72 37 и— или через передачу — и —, винт вертикальной подачи - через 72 37 2 72 2 цилиндрические колеса —,— и червячную пару — или — и —. Изменение направления движения подачи производится переключением зубчатых колео. z = 36 на валах V и И. Быстрые установочные перемещения стола происходят в направлении включенной подачи от электродвигателя Мь который через передачу —, левое храповое колесо z = 80 вращает вал I. Далее движение передается столу через кинематическую цепь подач. Столу можно сообщить и ручное перемещение с помощью-квадратов на валах V и И. Прерывистые вертикальные подачи суппорта. В конце обратного хода ползуна упор 6 (см. рис. 101) нажимает на ролик механизма вертикальных подач (рис. 102, б), поворачивая храповое колесо z = 25, от которого вращение ,-17 33 передается зубчатым колесам — и через коническую пару колес — вращение получает винт с шагом Р = 5 мм. В результате происходит вертикальное перемещение суппорта. Вертикальное перемещение суппорта вручную осуществляется вращением маховичка при выключенном коническом колесе z=22.
|