Структура системы управления
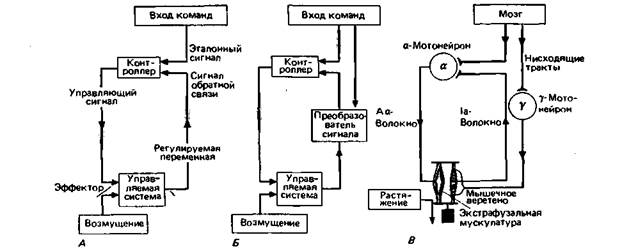
Блок-схема, представленная на рис. 15.1, В, более подробно изображена на рис. 15.2, А. Она иллюстрирует основные понятия теории управления [5, 7, 8, 10, 11]. Рассмотрим их на примере системы для регуляции температуры в комнате. Параметр, который нужно поддерживать на постоянном уровне (в нашем примере-комнатная температура), называется управляемой переменной. Физические устройства, участвующие в процессе регулирования, составляют управляемую систему (комната и нагреватель). Значение управляемой переменной измеряется датчиком (термометром). Датчик передает соответствующий сигнал обратной связи на контроллер (термостат). Контроллер сравнивает сигнал обратной связи с эталонным сигналом (получаемым с помощью селектора температуры), который соответствует контрольной (заданной) точке для данной схемы (желаемой температуре). Если сигнал обратной связи отличается от эталонного сигнала и зафиксирована ошибка,контроллер начинает осуществлять коррекцию. Он посылает сигнал управления на устройство, обеспечивающее необходимое изменение создавшейся ситуации,- управляющий элемент, или эффектор (нагреватель с регулируемым тепловым потоком). Сигналы управления передаются непрерывно до тех пор, пока сигнал обратной связи и эталонный сигнал не уравняются. Источники возмущений, т. е. факторы, вызывающие отклонение регулируемой (управляемой) переменной от контрольного значения (заданной точки),
ГЛАВА 15. ОБЩИЕ ПРИНЦИПЫ РЕГУЛЯЦИИ 335 могут быть разными; в данном случае это потеря тепла или утечка тепла из комнаты. Таким образом, важнейшее свойство системы управления — это наличие обратной связи, позволяющей автоматически корректировать любое отклонение управляемой переменной от требуемого значения. Поскольку главное назначение обратной связи состоит в минимизации отклонения управляемой переменной от контрольной точки, применяют термин отрицательная обратная связь. Системы без обратной связи. Стандартные элементы системы управления могут составлять и незамкнутую систему, без обратной связи (например, такую, в которой не вырабатывается сигнал, соответствующий значению температуры). В данной системе могут компенсироваться только такие внешние возмущения, которые известны заранее (например, установленная величина охлаждения в течение ночи), но не различные неожиданные возмущения (например, тепловые потери из-за изменения погоды или случайного открывания окон и дверей). Регуляторы и следящие системы. До сих пор мы рассматривали способность системы управления поддерживать управляемую переменную на одном и том же заранее заданном уровне. Подобные системы управления обычно называют регуляторами. Рассмотрим теперь такой режим работы, при котором заданное значение может быть изменено произвольным образом. Например, мы меняем заданную точку, когда поворачиваем ручку регулировки на термостате для обогревания комнаты. Реакция контроллера на изменение эталонного сигнала в целом такая же, как на изменение сигнала обратной связи. В данном случае измеряется различие между двумя сигналами, после чего эффектор воздействует на регулируемую переменную до тех пор, пока она не достигнет нового требуемого значения. Такие системы управления, в которых за счет обратной связи регулируемая переменная будет следовать за изменением контрольной точки (заданного значения), называют сервомеханизмами или следящими системами.
|