Проектирование и исследование механизмов мотороллера. Графоаналитический метод анализа
Техническое задание, исходные данные…………………………………….…….5 1 Определение закона движения механизма мотороллера…...……………..…...8 1.1 Определение размеров кривошипно-ползунного механизма……………......8 1.2. Построение диаграмм движущих сил, действующих на поршень.…..…….9 1.3. Определение передаточных функций. ………………………...…..…………10 1.4. Определение приведенного момента от сил, действующих на механизм..…..……………………………………………………………………...11 1.5. Определение суммарного приведенного момента инерции механизма.......12 1.6. Определение работы суммарного приведенного момента сил …………...14 1.7. Определение угловой скорости первого звена кривошипно-ползунного механизма. ………………………….……………………………………………..15 1.8 Определение углового ускорения первого звена кривошипно-ползунного механизма………………………………………………………………………….16 1.9 Определение времени движения кривошипно-ползунного механизма..…...17 2 Силовой расчет основного механизма…………………………………………..19 2.1 Исходные данные для силового расчета………………………………………19 2.2 Определение скоростей центров масс звеньев механизма и угловой скорости шатуна………………………………………………………...................................20 2.3 Определение ускорений центров масс звеньев механизма и углового ускорение шатуна……………………………………………………………….…21 2.4 Определение главных векторов и главных моментов сил инерции для заданного положения механизма…………………………………………………22 2.5 Силовой расчет…………………………………………………………………..23 3 Проектирование цилиндрической зубчатой передачи…………………………27 3.1 Качественные показатели зубчатой передачи……………………………...….27 3.2 Выбор коэффициентов смещения с учетом качественных показателей…….28 3.3 Геометрический расчет эвольвентной зубчатой передачи внешнего зацепления………………………………………………………………………….29 3.4 Построение профиля зуба, изготовляемого реечным контуром…………....32 3.5 Построение проектируемой зубчатой передачи………………………….…..34 3.6 Проектирование планетарного редуктора………………………………….…36 3.7 Графическая проверка…………………………………………………...….….40 4 Проектирование кулачкового механизма…………………………………….…42 4.1 Построение кинематических диаграмм методом графического интегрирования………………………………………………………………..…..42 4.2 Определение основных размеров кулачкового механизма по условию ограничения угла давления…………………………………………………….…44 4.3 Построение профиля кулачка……………………………………………….….47 4.4 Построение графика угла давления……………………………………………48 Заключение…………...……………………………………………………………...49 Приложение………………………………………………………………………….50 Литература………………………………………………………...…………………53
Техническое задание.
Проектирование и исследование механизмов мотороллера.
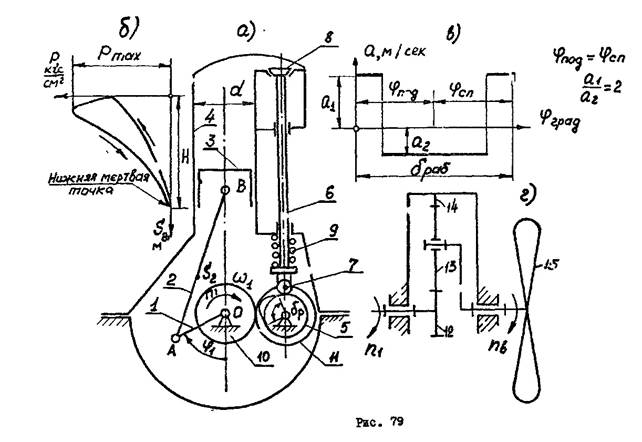
Механизмы движения мотороллера объединяют одноцилиндровый двухтактный двигатель внутреннего сгорания и вспомогательные устройства: механизм газораспределения и механизм привода вентилятора (рис.79). Основным механизмом двигателя является кривошипно-ползунный (рис.79а), который состоит из кривошипа 1,шатуна 2 и поршня 3. Диаграмма изменения давления в цилиндре 4 двигателя (рис.79б) строится по данным таблицы 2. Рабочий цикл двухтактного двигателя осуществляется за один оборот кривошипа. Управление газораспределением двигателя внутреннего сгорания осуществляется кулачковым механизмом, состоящим из кулачка 5 и толкателя 6 с роликом 7, воздействующим на выпускной клапан 8. Для прижима ролика к кулачку используется цилиндрическая пружина 9. Движение распределительного вала обеспечивается парой зубчатых колес 10 и 11, передаточное отношение которой I10-11=1. Закон изменения ускорения толкателя в пределах рабочего угла поворота dраб кулачка показан на рис. 79в. Для привода вентилятора 15 охлаждения д.в.с. использован планетарный редуктор 12-13-14 (рис.79г) с числом сателлитов k=3. Запуск двигателя начинается с нижней мертвой точки j1=0, с начала участка сжатия при начальной угловой скорости вращения ω1нач=0 и производится вручную моментом запуска МЗ. Можно считать, что необходимый для запуска крутящий момент МЗ не зависит от угла поворота кривошипа и равен максимальному значению приведенного момента силы давления сжатия.
Таблица 1. Исходные данные.
Таблица 2. Давление в цилиндре двигателя (в долях от максимального давления) в зависимости от положения поршня.
|