Пояснения к выполнению работы
1. В САУ с ПИ-регулятором коэффициент передачи пропорционального звена считать равным номеру варианта. 2. Для САУ с П-регулятором, И-регулятором и ПИ-регуляторомцелесообразно создать отдельные модели в Matlab-Simulink, отличающиеся набором звеньев в блоке «РЕГ.» (рис. 1). 3. График зависимости e= f ( 4. Определение граничного значения коэффициента передачи регулятора по п. 4 программы выполнить, используя критерий Гурвицадля определения устойчивости замкнутых САУ. 5. Для определения интегральной оценки необходимо дополнить модели САУ фрагментом структурной схемы, показанной на рис. 2, и подключить входы g и y к задающему воздействию и выходу САУ соответственно. Экспериментальное определение 6. При выполнении п. 10 программы для каждого типа САУ моделируются три переходных процесса: а) при
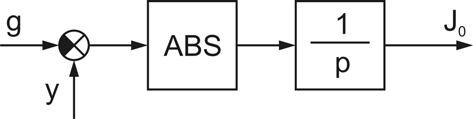
Рис. 3.2.
Содержание отчета Отчет о выполнении работы должен содержать:
1. Расчет и график зависимости e= f ( 2. Экспериментальный график зависимости e= f ( 3. Расчет граничных коэффициентов передачи регулятора по п. 4. 4. График зависимости 5. Семейства переходных процессов и их показатели качества по п. 10. 6. Выводы о влиянии типа регулятора и его параметров на работу САУ в различных режимах и ее устойчивость.
Контрольные вопросы 1. Дайте определение статической и астатической САУ. 2. Каким образом тип регулятора (П, И или ПИ) и его параметрывлияют на величину статизма? 3. Каким образом тип регулятора (П, И или ПИ) влияет на характер переходного процесса? 4. Назовите виды переходных процессов и охарактеризуйте их по показателям качества. 5. Чем объясняется наличие экстремума интегральной оценки? 6. Сформулируйте критерий Гурвица для определения устойчивости замкнутой САУ.
|
 ) необходимо строить вручнуюпо результатам моделирования САУ с П-регулятором. Для построенияграфика проводится серия численных экспериментов на модели приразличных значениях
) необходимо строить вручнуюпо результатам моделирования САУ с П-регулятором. Для построенияграфика проводится серия численных экспериментов на модели приразличных значениях  . В каждом эксперименте определяется величина ε, которая наносится на координатную сетку. Число точек(экспериментов) определяется произвольно, исходя из внешнего видаграфика.
. В каждом эксперименте определяется величина ε, которая наносится на координатную сетку. Число точек(экспериментов) определяется произвольно, исходя из внешнего видаграфика. и построение графика
и построение графика  ) выполняется также, как и в п. 3 пояснений. При этом диапазон изменений
) выполняется также, как и в п. 3 пояснений. При этом диапазон изменений  (см. п. 4 программы).
(см. п. 4 программы). ; б) при
; б) при  , где
, где