
Порядок выполнения работы. 1. Разработать модель объекта регулирования в MatLabSimulink (рис
1. Разработать модель объекта регулирования в MatLabSimulink (рис. 4.1, табл. 4.1) во временной и частотной областях. Получить на модели частотные и переходные характеристики системы, определить показатели качества системы 2. Рассчитать передаточную функцию объекта регулирования по задающему воздействию.
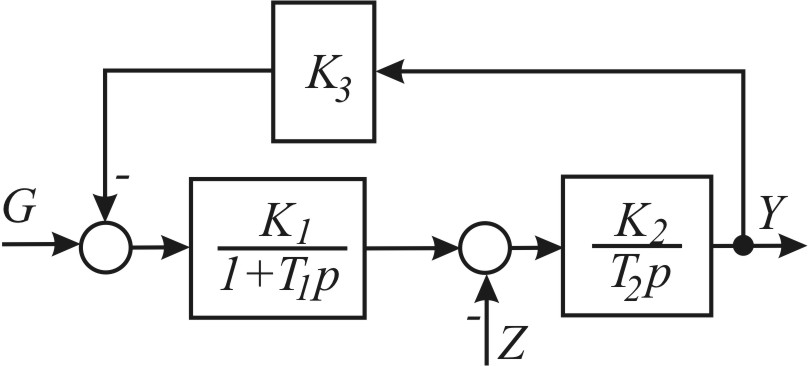
Рис. 4.1. Структурная схема объекта регулирования Таблица 1
3. Рассчитать параметры последовательного корректирующего звена, производящего настройку системы, замкнутой жесткой отрицательной единичной обратной связью, на технический оптимум. 4. Разработать модель системы в MatLabSimulink по п. 3 во временной и частотной областях. Получить на модели частотные характеристики разомкнутой системы и переходные характеристики замкнутой системы, определить показатели качества системы, сравнить их с теоретическими характеристиками. 5. Рассчитать параметры последовательного корректирующего звена, производящего настройку системы, замкнутой жесткой отрицательной единичной обратной связью, на симметричный оптимум. 6. Разработать модель системы в MatLabSimulink по п. 5 во временной и частотной областях. Получить на модели частотные характеристики разомкнутой системы и переходные характеристики замкнутой системы, определить показатели качества системы, сравнить их с теоретическими характеристиками. Содержание отчета Отчет о лабораторной работе должен содержать:
1. Расчет передаточной функции объекта регулирования по задающему воздействию. 2. Расчет последовательного корректирующего звена по п. 2 и 4 задания. 3. Модель в MatLabSimulink и графики переходных и частотных характеристик по п. 1, 4 и 6 задания. Графики переходных процессов должны отображать: - переходные процессы при скачкообразном изменении задающего сигнала при граничных значениях возмущающего сигнала. Величина скачка соответствует максимальному и минимальному значениям задающего сигнала; - переходные процессы при скачкообразном изменении возмущающего сигнала при граничных значениях выходного сигнала. Величина скачка соответствует максимальному и минимальному значениям возмущающего сигнала. 4. Определение типовых показателей качества переходных процессов по п. 4 и 6 задания. 5. Выводы об адекватности полученных результатов.
Контрольные вопросы
1. Дайте определение типовым показателям качества регулирования в системах автоматического регулирования. 2. Перечислите типовые соединения динамических звеньев. Приведите примеры их преобразования. 3. В чем назначение последовательных корректирующих звеньев? 4. Как определяют параметры последовательных корректирующих звеньев? 5. Каковы параметры системы при настройке на технический оптимум и симметричный оптимумы? Как выглядят переходные и частотные характеристики системы, каковы при этом показатели качества регулирования?
|



 , с
, с
 , с
, с



