
Механизм первого класса
В нашем примере это кривошип АВ (звено 1), соединенный со стойкой вращательной кинематической пары А (см. рис. 17). Будем рассматривать равновесие кривошипа с приложенной к нему в точке В под прямым углом уравновешивающей силой
а б в Рис. 22. Расчетная схема механизма 1-го класса (а); ведущего звена 1 (б) и план сил звена 1 (в)
Уравновешивающую силу найдем из условия равновесия: Σ МА = 0 Py × AB – R 21 × h 21 = 0 Теперь осталось найти реакцию в кинематической паре А, для чего рассмотрим равновесие звена 1 (рис. 22, б). Векторная сумма сил, приложенных к звену, должна быть равна нулю: По масштабу сил из плана сил находим величину реакции Таким образом, выполнен силовой расчет механизма, заключающийся в определении реакций во всех кинематических парах и уравновешивающей силы. По условию задания также требуется найти уравновешивающую силу с помощью рычага Жуковского.
|
 (рис.22,а). К этой же точке В приложена реакция
(рис.22,а). К этой же точке В приложена реакция 
 , которую мы уже нашли, решая структурную группу звеньев 2-3.
, которую мы уже нашли, решая структурную группу звеньев 2-3.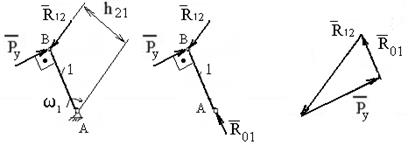
 .
. . Здесь неизвестна только реакция
. Здесь неизвестна только реакция  , которую находим из плана сил (рис. 22, в). Строим последовательно вектора
, которую находим из плана сил (рис. 22, в). Строим последовательно вектора  . Вектор, соединяющий на рис. 16,в конец вектора
. Вектор, соединяющий на рис. 16,в конец вектора  с началом вектора
с началом вектора 


