Способы превращения гироскопа в гирокомпас.
Смещение центра тяжести чувствительного элемента вниз по оси Z–Z. На рис. 3.9 изображен гироскоп, заключенный в гирокамеру, в нижней части которой укреплен груз, благодаря чему центр тяжести G гирокамеры смещен относительно точки подвеса О вниз на расстояние а, называемое метацентрической высотой чувствительного элемента. Предположим, что такой прибор установлен на экваторе и в первоначальный момент его главная ось X–X горизонтальна и выведена из меридиана на угол 90°, т. е. направлена по линии Ost –W (рис.3.10). В этом положении сила тяжести Р гирокамеры с грузом не будет создавать момента относительно точки подвеса, поскольку она лежит на линии действия силы. Следовательно, гироскоп вследствие своего основного свойства будет стремиться сохранять неизменным первоначальное направление главной оси.
Итак, гироскоп с пониженным центром тяжести, будучи выведенным из меридиана, совершает прецессионное движение к меридиану и, как мы увидим в дальнейшем, его ось в конечном итоге установится в меридиане. Такой гироскоп становится указателем меридиана, т. е. чувствительным элементом гирокомпаса. Гироскоп с пониженным центром тяжести является гироскопом с неполной связью. Действительно, при горизонтальном положении оси X–X прибора угол β и момент Вβ равны нулю. Но стоит только вывести ось X–X прибора из горизонтального положения, как сразу же появляется угол β и момент Вβ, который заставит прибор прецессировать к меридиану.
Таким образом, главная ось гироскопа с неполной связью так же, как и ось связанного относительно оси Y–Y гироскопа, будучи выведенной из меридиана, получает движение к меридиану. При этом необходимо отметить, что у всех гирокомпасов с пониженным центром тяжести чувствительного эле-мента северным концом главной оси является тот, со стороны которого вращение ротора усматривается совершающимся против движения часовой стрелки. Другими словами, вектор кинетического момента H у этих гирокомпасов направлен на север, что видно из рис. 3.10. Превращение гироскопа в гирокомпас путем снижения центра тяжести чувствительного элемента применяется в отечественных гирокомпасах типа «Курс», «Амур» и других. Эти гирокомпасы называют часто гирокомпасами с твердым маятником или гирокомпасами с положительным маятником.
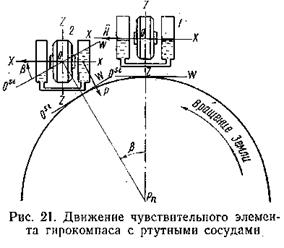
Подвес к гирокамере сообщающихся сосудов с ртутью На рис.3.11 показана гирокамера, к которой прикреплены два сообщающихся сосуда с тяжелой жидкостью (ртутью). Сосуды располагают так, что оси сосудов, проходящие через центры площадей их поперечных сечений, находятся в плоскости XOZ или параллельны этой плоскости. Все устройство отбалансировано так, что его центр тяжести совмещен с точкой подвеса О. Подвес в гирокамере сосудов с ртутью для превращения гироскопа в гирокомпас применен в гирокомпасе «Сперри-минор» и в некоторых других. Такие гирокомпасы чаще называются гирокомпасами с жидкостным или гидравлическим маятником или гирокомпасами с отрицательным маятником.
Электромагнитное управление В рассмотренных случаях прецессионное движение чувствительного элемента к меридиану создается моментами, пропорциональными углу наклона β главной оси к горизонту. Подобные же моменты могут быть введены электромеханическим способом. С этой целью на неуравновешенном чувствительном элементе устанавливается измерительное устройство, называемое индикатором, горизонта (рис. 3.12), в котором вырабатывается электрический сигнал, пропорциональный углу β наклона главной оси прибора к горизонту. Сигнал индикатора горизонта усиливается в специальном усилителе и подводится к обмотке индук-ционного датчика, который преобразует сигнал во вращающий момент относительно оси Y–Y чувствительного элемента. В дальнейшем этот датчик будем называть датчиком горизонтального момента. Индикатор горизонта представляет собой герметизированный корпус, заполненный вязкой жидкостью, в которую погружено рабочее тело индикатора. Рабочее тело прикреплено к корпусу индикатора пружинами. Плотность жидкости подобрана такой, чтобы рабочее тело имело нейтральную плавучесть. При симметричном положении якоря 2 относительно сердечника 4 сигнального трансформатора сопротивления магнитных цепей вторичных обмоток равны между собой и наводимые в этих обмотках э. д. с. взаимно компенсируются. При смещении якоря из симметричного положения на выходе сигнального трансформатора появляется сигнальное напряжение u, равное разности э. д. с, наводимых в каждой вторичной обмотке.

Предположим, что в первоначальный момент главная ось X–X чувствительного элемента горизонтальна и направлена по линии Ost –W. В этом случае якорь индикатора горизонта ИГ (рис.3.13) занимает симметричное положение относительно сердечника трансформатора в индикаторе горизонта и на статоре датчика горизонтального момента ДМy сигнальное напряжение отсутствует и поэтому момент относительно оси Y–У не вводится. В следующий момент в результате вращения Земли главная ось X–X окажется наклоненной к плоскости истинного горизонта на некоторый угол β. Под действием проекции силы тяжести Рsinβ рабочее тело сместится из симметричного положения и в индикаторе горизонта появится напряжение и. Сигнальное напряжение, усиленное в усилителе У до величины uус, поступит на статор датчика горизонтального момента ДМy. Последний введет момент LДУ относительно оси Y–Y чувствительного элемента, и чувствительный элемент начнет совершать прецессионное движение вокруг вертикальной оси, т. е. к меридиану. Таким образом, и в гирокомпасе с электромагнитным управлением при определенных условиях угловая скорость прецессии чувствительного элемента к меридиану зависит только от угла β наклона главной оси прибора к плоскости истинного горизонта.
|