Обоснование выбора типа регулятора
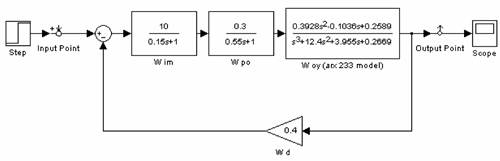
На основании заданных значений передаточных функций построим схему системы автоматического регулирования обжига клинкера в SIMULINK (рис. 18).
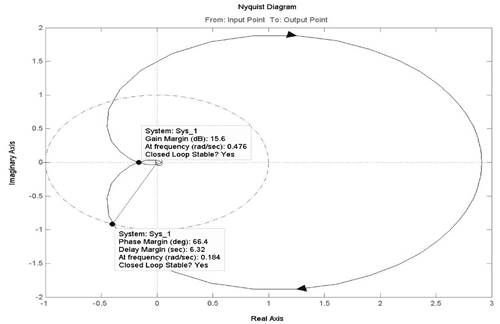
С помощью LTI построим переходную характеристику, ЛАХ и ЛФХ САР сухого помола цементного клинкера в трубной шаровой мельнице (рис. 19).
По виду переходной характеристики можно сказать, что имеющиеся показатели качества не удовлетворяют заданным: · Время регулирования составляет 24.6 с. · Установившееся значение – 1.34 · Время нарастания – 10.3 с. · Статическая ошибка – 0,66 Заданные показатели качества и запасы устойчивости: Время регулирования ≤50 с Для построения ЛАХ, ЛФХ и АФХ необходимо разомкнуть систему (рис. 20), (рис. 21).
По виду переходного процесса ясно, что для обеспечения заданных показателей качества и точности переходного процесса необходимо введение в систему линейного регулятора. Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования. В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов. Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций: И – регулятор со статическим ОР – при медленных изменениях возмущений и малом времени запаздывания (τ/Т<0.1); Исходя из выше изложенных рекомендаций и учитывая, что вид переходной характеристики напоминает апериодический процесс, видно, что в данную систему подойдет П – регулятор с передаточной функцией Wreg(p) = Kp. Получим следующего вида САР(рис. 22):
|