Глобальные спутниковые системы
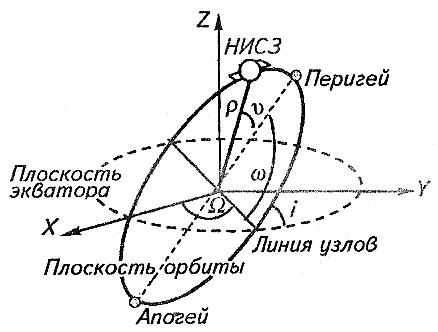
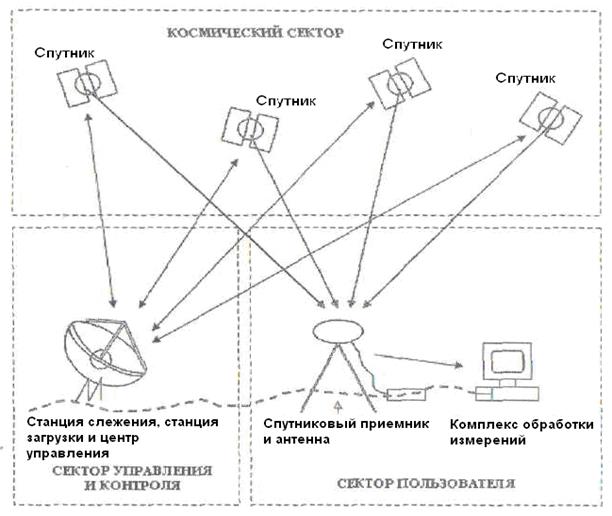
Появление искусственных спутников Земли (ИСЗ) внесло масштабные перемены в методы геодезии и позволило значительно повысить точность определения местоположения точек и объектов на поверхности Земли. Идея использования космических аппаратов для навигации подвижных объектов начала развиваться после запуска в СССР в 1957 году первого ИСЗ. К первому поколению спутниковых систем позиционирования до 70-х годов относят системы «Цикада» и «Transit». В 1963 году начались работы по построению первой советской низкоорбитальной навигационной спутниковой системы «Цикада». В 1967 году на орбиту был выведен первый отечественный навигационный спутник «Космос-192». Для радионавигационных спутниковых систем первого поколения характерным является применение низкоорбитальных ИСЗ и использование для измерения навигационных параметров объекта сигнала одного, видимого в данный момент спутника. В 1964 году в США была создана доплеровская спутниковая радионавигационная система первого поколения «Transit», предназначенная для навигационного обеспечения пуска с подводных лодок баллистических ракет. В 1967 году эта система была предоставлена для коммерческого использования, число ее гражданских потребителей быстро превысило число военных. Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6-7 космических аппаратов, который мог находиться в поле видимости в течении примерно 40 минут. Эти системы обеспечивали точность получения координат 50-100 м и отличались малой оперативностью: для достижения высокой точности требовались несколько прохождений ИСЗ в «Поле зрения» приемника, при этом перерывы между прохождениями спутников составляли полтора часа. Это послужило основанием для разработки систем второго поколения – глобальных спутниковых систем. В настоящее время в мире существуют три глобальные системы. GPS (Global Positioning System) – глобальная система позиционирования (первоначально называлась Navstar) находится в ведении Минобороны США. Запуск спутников первого блока осуществлен в 1978 году, эксплуатируется с 1995 года. До недавнего времени система была открыта для гражданского пользования только в режиме пониженной точности, для режима высокой точности требовался санкционированный доступ. В 2000 году это ограничение снято, и сейчас GPS открыта для всех и в режиме высокой точности. ГЛОНАСС – Глобальная навигационная спутниковая система, ее разработки начаты в СССР в 1970 г. В 1982 году выведены на орбиты ее первые спутники, в 1993 году система принята в эксплуатацию Минобороны РФ. В 1996 году система развернута полностью. Повышенная точность доступна поенным, режим стандартной (пониженной) точности – гражданским пользователям. В связи с отсутствием финансирования система пришла в упадок, но в настоящее время ведется активная работа по ее восстановлению. В 1999 году Европейский парламент поддержал решение Европейского космического агентства о создании нового поколения спутниковой системы Galileo, которая будет включать 30 спутников (из них 3 резервных), расположенных на высоте 23200 км и вращаются в трех орбитальных плоскостях, наклоненных на 56° к плоскости экватора. Таким образом, с учетом спутников GPS и ГЛОНАСС в распоряжении пользователей будет 80 космических аппаратов, покрывающих весь земной шар. Глобальные спутниковые системы состоят из трех секторов (сегментов) (рисунок 48): космического сектора, наземного сектора управления и контроля и сектора пользователя. Космический сектор – совокупность входящих с систему спутников (орбитальная группировка), вращающихся вокруг Земли на определенных орбитах. Размеры и форма эллиптической орбиты определяются размером ее большой полуоси а и эксцентриситета е. В системе GPS большая полуось и эксцентриситет примерно равны 26560 км и 0,001 соответственно. Положение плоскости орбиты относительно экваториальной плоскости (рисунок 49) характеризуют: долгота восходящего узла Ω, аргумент перигея ω и угол i наклона плоскости орбиты к плоскости экватора. Для системы GPS: ω=80°, i=55°.
Рисунок 48 Структура глобальной спутниковой системы
Рисунок 49 Основные элементы орбиты ИСЗ
Положение ИСЗ на орбите описывает радиус-вектор ρ, который определяют по формуле:
где Составляющие радиуса-вектора (его пространственные инерциальные геоцентрические прямоугольные координаты xC, yC, zC) имеют следующий вид:
где При невозмущенном движении ИСЗ названные параметры Ω, i, ω, ρ и е постоянны и не меняются при движении спутника по орбите. При этом истинная аномалия υ характеризует положение спутника на орбите в определенный момент времени, называемый «эпохой». В GPS ИСЗ размещены на шести орбитальных плоскостях по четыре спутника в каждой (рисунок 50), высота орбиты 20145 км, восходящие узлы орбит в GPS расположены примерно по экватору и отстоят друг от друга по долготе на 60° на восток. В ГЛОНАСС на трех орбитальных плоскостях должны вращаться равномерно расположенные на каждой орбите 24 ИСЗ (рисунок 50), тип орбиты круговой, высота орбиты 19100 км, наклон орбиты 64,8°, период обращения – примерно 12 часов.
Рисунок 50 Созвездие ИСЗ систем GPS и ГЛОНАСС
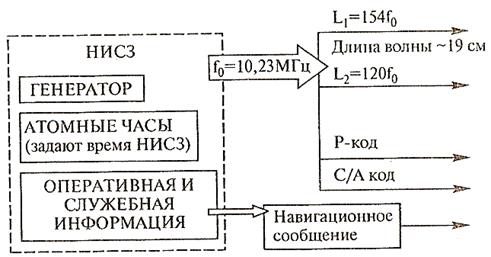
При невозмущенном движении ИСЗ параметры орбиты в каждый фиксированный момент времени постоянны и не меняются при движении спутника по орбите. Пространственное положение ИСЗ характеризуют его бортовые эфемериды, включающие в себя пространственные прямоугольные координаты (WGS-84 – для GPS и ПЗ-90 – для ГЛОНАСС) на определенный момент времени tk (на определенный эпоху). Бортовые эфемериды вырабатываются в результате обработки измерений, выполняемых Сектором управления и контроля (рисунок 48), состоящем из станции слежения, службы точного времени, главной станции с вычислительным центром и станции загрузки информации на спутники. По результатам соответствующих измерений бортовые эфемериды загружаются на ИСЗ раз в сутки. При этом влияние погрешностей эфемерид (неточность определения параметров орбит, непрогнозируемые смещения ИСЗ и т.д.) на точность абсолютного положения определяемых пунктов не превышает для ГЛОНАСС – 9,2 м, и системы GPS – 1 м. ИСЗ движется по орбите в некоторой шкале времени. В ГНСС используют следующее время: всемирное (гринвичское среднее солнечное); всемирное координированное; поясное; местное декретное и летнее. Всемирное время UT содержит год, месяц, число, час, минуту и секунду. При этом первые три величины (год, месяц и число) отсчитывают по Григорианскому календарю, час, минуту и секунду – по местному среднему времени на гринвичском меридиане. Всемирное время измеряют часовым углом среднего Солнца относительно гринвичского меридиана, увеличенного на 12 часов. Всемирное координированное время UTC измеряют по атомным часам и передают по радиовещательным сетям, используют в повседневной жизни. Поясное время ZT также содержит год, месяц и число. Часы, минуты и секунды в поясном времени соответствуют местному среднему времени основного (центрального) географического меридиана определенного часового пояса, значение которого вычисляют по формуле: ZT = UTC + Δn, (271) где Δn – номер часового пояса. Поясное время введено в России с 1919 года. При этом поверхность Земли была разделена на 24 часовых пояса, центральные меридианы которых отличаются по долготе на 15° (1 час). Например, для Москвы Δn=2. Местное декретное время отличается от поясного времени на декретную добавку Δtдкр, устанавливаемую для каждого региона законодательным порядком. В России в качестве местного декретного времени действует летнее время tл, которое действует ежегодно с 2 часов ночи последнего воскресенья марта до 3 часов ночи последнего воскресенья сентября, когда вводят зимнее время tзим = ZT + 1 час. (272) В GPS используют шкалу времени, привязанную к шкале UTC/ При этом в системе имеется свой недельный календарь, в котором номер недели отсчитывается с ночи с 5-е на 6-е января 1980 г. ГЛОНАСС привязана к шкале Государственного эталона частоты и времени России UTC (SU). Принцип определения местоположения с помощью ГНСС предусматривает измерение расстояний (дальностей) между ИСЗ и фазовым центром антенны приемника спутниковых сигналов, установленного на определяемой точке местности. С целью реализации данного принципа каждый ИСЗ излучает радиосигналы, структура которых для системы GPS показана на рисунке 51.
Рисунок 51 Структура радиосигнала системы GPS В радиолинии частотного диапазона L1 спутники системы GPS одновременно излучают кодовые последовательности стандартной (P-код) и высокой (C/A-код) точности. Также излучается несущий электромагнитный сигнал частотой L2. При необходимости C/A-код может быть отключен. В системе GPS все спутники работают на одних и тех же частотах, но каждый имеет свой код. В ГЛОНАСС каждый спутник работает на собственной частоте. Разделение сигналов частотное. Так же, как и в GPS, несущие сигналы обозначают как L1 и L2, а P-коду соответствует ВТ-код (код высокой точности) и СТ-код (код стандартной точности). Одновременно с измерительными сигналами с ИСЗ передается хранящаяся на нем, т.н., оперативная и неоперативная информация, сформированная в виде кадра навигационного сообщения. Оперативная информация содержит: эфемериды ИСЗ (три пространственных прямоугольных координаты X, Y, Z, три составляющих скорости ИСЗ и три составляющих ускорения); метку времени; сдвиг шкалы времени ИСЗ относительно шкалы времени всей системы и другие сведения. Неоперативную информацию образует альманах системы, содержащий параметры орбит всех спутников системы и другие сведения. Полный кадр систем ГЛОНАСС и GPS передается в течение 10-12 минут.
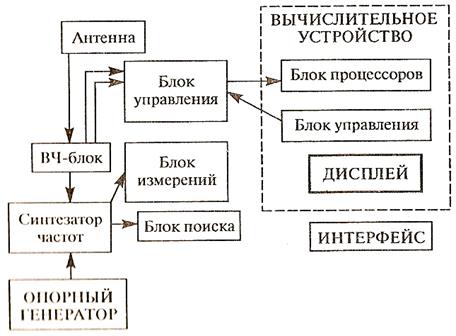
Обработку сигналов выполняют с целью выработки необходимой потребителям информации (пространственно-временных координат, направления и скорости, пространственной ориентации и т.д.). Упрощенная структурная схема приемника спутниковых сигналов показана на рисунке 53. Приемное устройство выполняет функции супергетеродинного приемника, а также первичную обработку сигналов. Соответствующие сигналы поступают в блок поиска и измерения. После завершения поиска происходит захват сигнала, который поступает в вычислительный блок. По указаниям наблюдателя результаты соответствующей обработки, как правило, могут быть отражены на дисплее.
Рисунок 53 Структурная схема приемника спутниковых сигналов
Выделяют три модификации приемников. Приемники первого класса предназначены для быстрых навигационных определений координат, такие приемники удобно использовать при рекогносцировке, выносе в натуру и съемке объектов с небольшой точностью. Приемники второго класса предназначены для определения положения движущихся объектов. Приемники третьего класса являются приемниками геодезического назначения, в них имеется многоканальный блок, осуществляющий слежение одновременно за сигналами нескольких ИСЗ (до 12 и более). Внутренняя память приемника до 100 Мб и более. Приемники оснащены портами для интеграции с другой аппаратурой, в том числе ПЭВМ. Значительный практический интерес представляют собой совмещенные GPS/ГЛОНАСС приемники. В общем случае приемники геодезического назначения выполняют следующие функции: генерация местной шкалы времени (местных эталонных колебаний); поиск, усиление и разделение сигналов, принадлежащих различным ИСЗ; фильтрация сигналов; выделение из сигналов меток времени и псевдослучайных последовательностей; слежение за частотой, фазой, кодовыми сигналами, измерение псевдодальностей до каждого ИСЗ; прием установочных параметров и маркеров, фиксирующих внешние события; выполнение различных оперативных расчетов; выдача в форме индикации на дисплее контроллера соответствующей информации об установочных указаниях и параметрах, результаты измерений, например в форме геодезических координат, о наличии и состоянии участвующих в радиосеансе ИСЗ и др.; прием поправок в псевдодальности от внешнего передающего устройства; передача результатов спутниковых наблюдений на другие радиоприемные устройства, в том числе телефон сотовой связи; хранение принятой информации. Конструктивно приемники, как правило, выделены в виде отдельных или совмещенных блоков, которые содержат антенное устройство, контроллер (мини-ЭВМ с клавиатурой) и аккумуляторы. Часто приемники имеют встроенный радиомодем, с помощью которого в реальном времени можно передать или принять по каналам связи необходимую информацию. Выбор конкретного вида приемника для проведения земельно-кадастровых геодезических работ, прежде всего, зависит от необходимой точности определения положения объектов.
|
 (269)
(269) ; е – эксцентриситет орбиты; υ – истинная аномалия (выражается в градусной мере).
; е – эксцентриситет орбиты; υ – истинная аномалия (выражается в градусной мере). (270)
(270) – аргумент широты.
– аргумент широты.
 Сектор пользователя (потребителя) включает в себя спутниковые приемники (рисунок 52), число которых не ограничено, а также комплекс камеральной обработки измерений.
Сектор пользователя (потребителя) включает в себя спутниковые приемники (рисунок 52), число которых не ограничено, а также комплекс камеральной обработки измерений.