
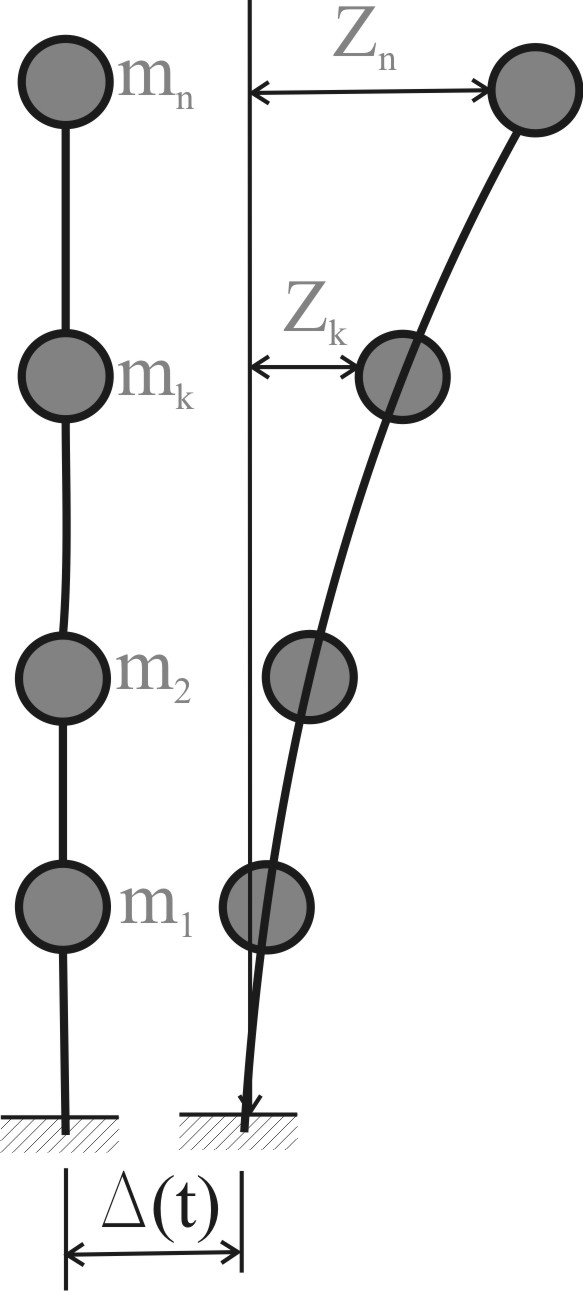
Движение системы с конечным числом степеней свободы
Разрешающая система уравнений МКЭ – уравнения равновесия узлов.
Где
Z – вектор перемещений, Р – вектор внешних сил. Решив матричную систему уравнений и найдя Z, вычислим усилия Sk элементов
В задачах динамики добавляем по принципу Даламбера силы инерции и диссипативные силы
А) Матрица жесткости
Для стандартных элементов на плоскости
Б) Матрица масс конечных элементов Если заданы точечные массы, то М – диагональная матрица, по соответствующим степеням свободы – эти массы. Если масса распределена – ее можно располагать в узлах. Большее число узлов разбиения приводит к большей точности расчетов. Если погонная масса стержней m, то узловую массу можно собрать собрать так:
В) Матрица демпфирования
Подробнее учет демпфирования опишем далее. Свободные колебания Для чего необходимо изучать свободные колебания? А) Перед любым сейсмическим расчетом полезно сначала определить спектр частот и формы собственных колебаний, оценить расчетную схему, подобрать соответствующую акселерограмму землетрясений. Б) Анализ собственных колебаний позволяет получить разрешающие уравнения движения метода модальной суперпозиции, или разложения по собственным формам колебаний. Итак, при свободных колебаниях С = Р = 0.
Ищем решение системы, считая колебания гармоническими
Где ω i, φ 0i – частота и фаза колебаний. Подстановка решения в систему дает
Это система «n» линейных однородных уравнений относительно неизвестных векторов Vi, которые составляют матрицу V:
Нетривиальное решение будет, когда определитель
Раскрывая определитель, получаем алгебраическое уравнение n-й степени относительно ω 2, решение которого дает спектр ω 1, ω 2, … ω n. Затем для каждой собственной частоты ω i из решения системы (n-1) уравнений (1) при, например, заданной величине V1i = 1определяем формы собственных колебаний
Условия ортогональности собственных форм Рассмотрим i – ю форму колебаний
Тогда амплитудное значение вектора перемещений
Для j –й формы соответственно (стрелки опускаем)
Применив теорему Бетти, рассматривая эти состояния как взаимно возможные,
Заменяя в последнем выражении инерционные силы по (2) и (3), по правилу транспонирования произведения матриц
Зная, что для симметричной матрицы
Т.к. Это Первое условие ортогональности собственных форм колебаний.
Если матрица М диагональная, то Запишем (1) в виде
Это Второе условие ортогональности собственных форм. Физический смысл полученных условий собственных форм: 1) 1-е условие: Возможная работа внешних сил инерции i – й формы колебаний на перемещениях j – й формы равна нулю. 2) 2 – е условие: Возможная работа внутренних сил упругости i – й формы колебаний на перемещениях j – й формы равна нулю. Если массы точечные и матрица М диагональна, то первое условие ортогональности можно записать в виде суммы
Этим равенством будем проверять расчет на собственные значения – определение частот и форм свободных колебаний конструкций.
|
 Уравнения движения
Уравнения движения
 – матрица жесткости системы,
– матрица жесткости системы, – матрица жесткости элементов,
– матрица жесткости элементов,


 , где
, где 


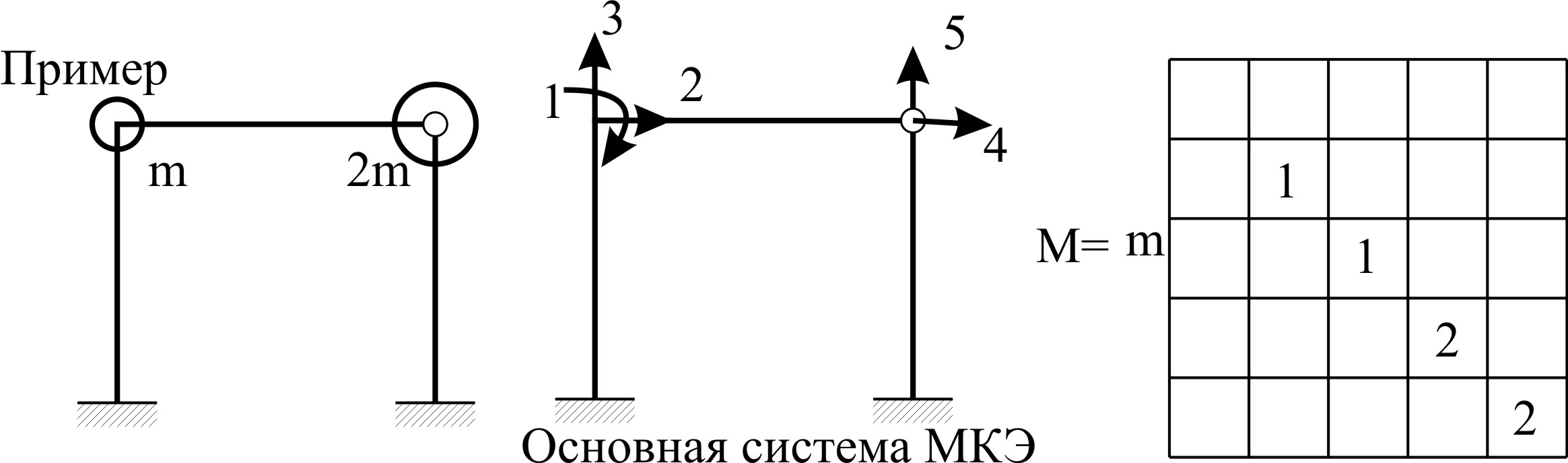 Ниже рассмотрен пример составления матрицы масс. В незаполненных клетках матрицы - нули.
Ниже рассмотрен пример составления матрицы масс. В незаполненных клетках матрицы - нули.

 ,
, (1)
(1) .
.
 .
.
 и вектора инерционных сил
и вектора инерционных сил 
 . (2)
. (2) . (3)
. (3) .
. получим
получим . (4)
. (4) , и что
, и что  - скаляр, значит, выражение для него равно транспонированному, то
- скаляр, значит, выражение для него равно транспонированному, то , поэтому запишем (4) в виде
, поэтому запишем (4) в виде .
. , следует
, следует  .
.
 и умножим слева на
и умножим слева на  , получим
, получим т.к.
т.к.  , получим
, получим




