
Теоретические сведения. К пищевым материалам в данной работе будем относить сырье, полуфабрикаты и готовые пищевые продукты
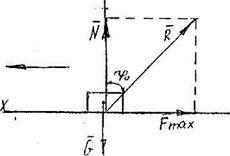
К пищевым материалам в данной работе будем относить сырье, полуфабрикаты и готовые пищевые продукты. Во всех отраслях пищевой промышленности широко используется гравитационный транспорт - это спускные желоба, лотки, трубы, каскадные и винтовые спуски, т.е. все те устройства, в которых движение груза происходит только под действием силы тяжести. Такой способ используется при подаче материала в бункеры, для перемещения от затворов и питателей к конвейерам, при перегрузке с конвейера на конвейер и т.п. Для перемещения сыпучего и мелкодисперсного материала подходят спускные трубы, для крупнокускового материала чаще используются спускные лотки, желоба, винтовые спуски. Штучный, плоскодонный груз (коробки, мешки, ящики, груз на поддонах) удобно перемещать по роликовым конвейерам, которые также относятся к гравитационному транспорту. Достоинство этого вида транспорта в отсутствии приводного устройства, невысокой стоимости, простоте. Недостатки: износ внутренней поверхности конвейера при движении груза скольжением; разрушение, крошение, возможная деформация груза при неправильно выбранном угле наклона конвейера, образование заторов при изменившихся условиях (например, повышенная влажность транспортируемого материала). Для снижения влияния недостатков таких устройств необходимо правильно подобрать угол наклона гравитационного транспортирующего устройства с учетом коэффициента трения материала. Сила трения скольжения направлена в сторону, противоположную возможному движению тела и достигает значения, не превышающего определенного предела. Наибольшая сила трения скольжения Fmax пропорциональна нормальному давлению N тела на поверхности и определяется законом Кулона. Fmax=f0'N, где fo - статический коэффициент трения скольжения. Схема движения тела по вертикальной поверхности представлена на рисунке 5.1.
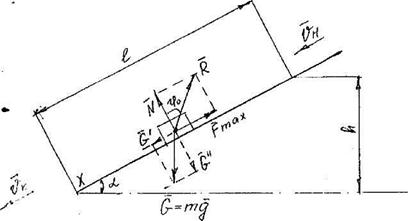
Рисунок 5.1 - движения тела по вертикальной поверхности Сила Fmax отклоняет реакцию R от нормали на угол Ф. Тангенс угла Ф трения в покое равен статическому коэффициенту трения f tgCP = -^ = fo (5.2) Динамический коэффициент трения скольжения f всегда меньше статического коэффициента f0 и зависит от материала соприкасающихся тел и их шероховатости. Для абсолютно гладких тел коэффициент f = 0, для реальных телf> 0. Рассматривая условия равновесия реального шероховатого тела на наклонной плоскости, представленные на рисунке 5.2, приходим к выводу, что при угле наклона α плоскости к горизонту больше чем угол трения в покое Ф тело начнет перемещаться в направлении оси X. Таким образом замерив угол α, равный углу трения Ф и вычислив значение tg α определим коэффициент трения скольжения в покое.
Рисунок 5.2 - Условия равновесия реального шероховатого тела Как сказано выше необходимым условием перемещения груза по спуску является превышение угла наклона α над углом трения груза. Из условия равноускоренного движения тела при α > Ф можно записать, что mg = G • sinα − f • G • cosα, (5.3) но mg = G, отсюда динамический коэффициент f трения a скольжения f = tgα − a
(5.4) где а - ускорение движения тела по наклонной плоскости при фиксированных значениях расстояний S0, S1 и времени t. _ 2S1 + 2S0 − 2(S1 + 2S0)2 − S1 (5.5) Если принять массу груза m, начальную скорость движения V0, а конечную Vк, то величину скорости движения груза по спуску можно определить по теореме об изменении кинетической энергии:
= mgh − mgflcosα (5.6)
учитывая, что h=1sinα, скорость на конечном участке определяется как Vк = yj2gl(sma-f cos α) + Vo2, или
(5.7) (5.8) Необходимо учитывать, что при большой длине конвейера скорость движения может достигнуть такой величины, при которой возможно повреждение груза. При известной начальной скорости Vo и заданной конечной скорости VК длина спуска L, обеспечивающая заданную скорость, определится из уравнения L = 2gh− Vк2 + Vo2 Fo (5.9) Для снижения скорости спуск делается составным, причем на одном участке при α > Ф груз приобретает необходимую скорость, на другом, при а < Ф, обеспечивается торможение.
|
 g-cosa
g-cosa Vк=2gh(1− fctgα) + Vo2, где f - коэффициент трения скольжения груза по спуску.
Vк=2gh(1− fctgα) + Vo2, где f - коэффициент трения скольжения груза по спуску.


