
Способы и кинематика поворота
Поворот автомобиля может осуществиться: a) Изменением направления движения управляемых колес; b) Созданием разности крутящих моментов; c) Изменением положений сечений шарнирно-сочлененной рамы (К-700; К-703; Т-125). Способ позволяет использовать тягово-сцепные свойства и улучшить (управляемость) маневренность машины. На автомобиле управляемой делают только переднюю пару колес.
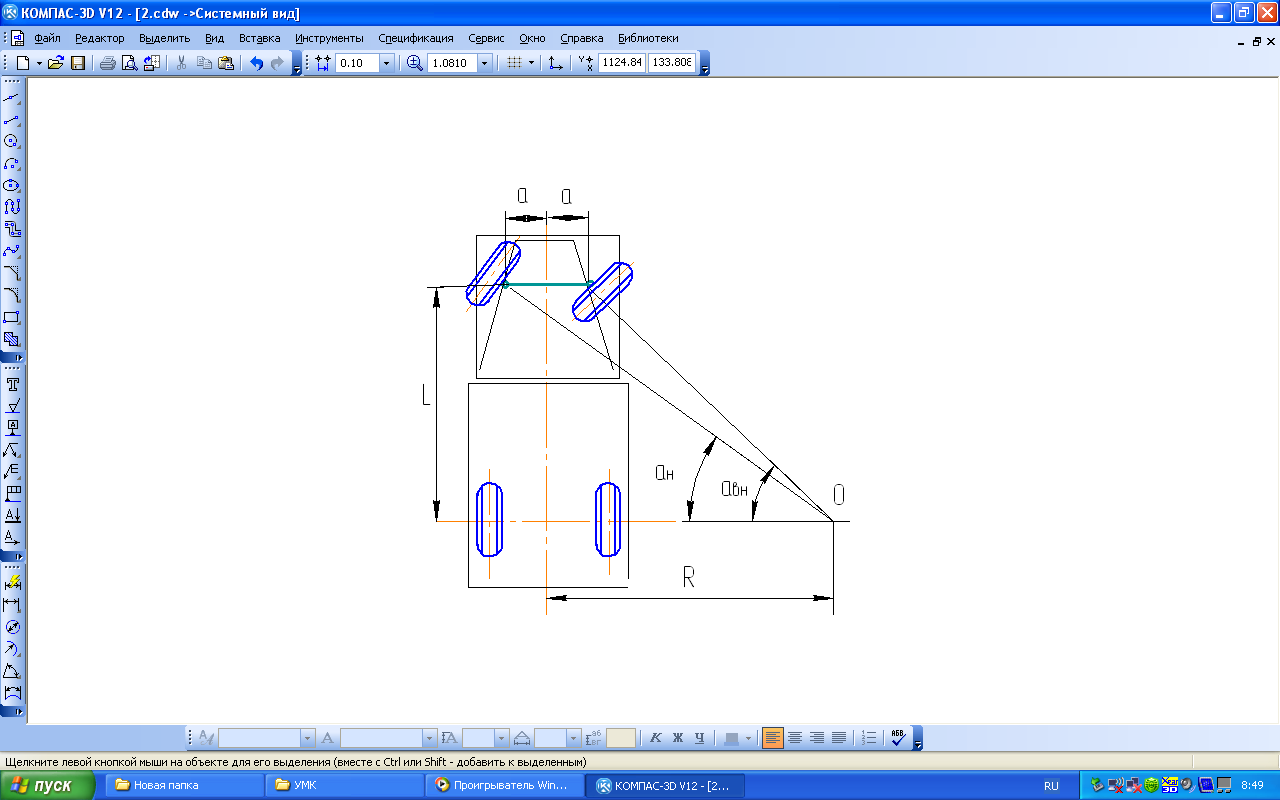
Рисунок 14- Кинематика поворота автомобиля с двумя передними управляемыми колесами. Чтобы наружное и внутреннее колесо катились по дугам окружностей с общим центром О, необходимо повернуть их на разные углы. Связь этих углов можно определить из условия пересечения перпендикуляров векторов скоростей, колес в центре вращения О:
Таким образом база Для обеспечения связи между углами поворота колес применяются специальные четырехзвенные шарнирные механизмы – рулевые трапеции. Конструктивно рулевое управление состоит из рулевого механизма и рулевого привода. Рулевой механизм могут иметь трущиеся пары. Червяк-ролик, червяк-сектор, винт-гайка. На автомобилях большой грузоподъемности устанавливается комбинированный рулевой механизм в виде сочетания: винт – гайка – рейка - сектор. Для уменьшения коэффициента трения винт – гайка осуществляется через циркулирующие шарики. Механизм и приводы руля выполняются с большим угловым передаточным числом
|



 и колея
и колея  влияют на маневренность машины.
влияют на маневренность машины. .
.
 - угол поворота рулевого колеса;
- угол поворота рулевого колеса; - угол поворота управляемого колеса.
- угол поворота управляемого колеса. . Это позволяет при малом усилии на рулевом колесе преодолевать значительное сопротивление дороги повороту управляемых колес. С увеличением
. Это позволяет при малом усилии на рулевом колесе преодолевать значительное сопротивление дороги повороту управляемых колес. С увеличением  снижается необходимое усилие на рулевом колесе, но растет угол его поворота и время, необходимое для полного поворота управляемых колес.
снижается необходимое усилие на рулевом колесе, но растет угол его поворота и время, необходимое для полного поворота управляемых колес.


