
Энергия гармонических колебаний
При механических колебаниях колеблющееся тело (или материальная точка) обладает кинетической и потенциальной энергией. Кинетическая энергия тела W:
(Скорость тела v = ds/dt) Для вычисления потенциальной энергии тела воспользуемся самой общей формулой, связывающей силу и потенциальную энергию тела в поле этой силы:
где U - потенциальная энергия, набираемая (или теряемая) телом, движущимся в силовом поле F от точки 0 (точки, в которой потенциальная энергия принимается равной 0) до точки х. Для силы, линейно зависящей от смещения (как в случае наших механических маятников, такие силы носят общее название квазиупругих сил) мы имеем:
1. Полная механическая энергия тела не изменяется при колебаниях: В случае электрических колебаний энергия в конуре представляет собой сумму энергии электрического поля, запасенной между обкладками конденсатора, и энергии магнитного поля, запасенной в катушке с индуктивностью. Вычислим обе составляющие.
Сравнивая эти формулы, можно сделать следующие выводы: 1. Полная энергия в контуре остается неизменной:
Поскольку в контуре происходят колебания электрической и магнитной энергий, электрический колебательный контур также называют электромагнитным. Математический, пружинный и физический маятник. 1. Пружинный маятник — это груз массой т, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы F = –kx, где k — жесткость пружины. Уравнение движения маятника
Из выражений (142.1) и (140.1) следует, что пружинный маятник совершает гармонические колебания по закону х=А соs (w0 t + j) с циклической частотой
и периодом
Формула (142.3) справедлива для упругих колебаний в пределах, в которых выполняется закон Гука (см. (21.3)), т. е. когда масса пружины мала по сравнению с массой тела. Потенциальная энергия пружинного маятника, согласно (141.5) и (142.2), равна
2. Физический маятник — это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, проходящей через точку О, не совпадающую с центром масс С тела (рис. 201). Если маятник отклонен из положения равновесия на некоторый угол a, то в соответствии с уравнением динамики вращательного движения твердого тела (18.3) момент M возвращающей силы можно записать в виде
где J — момент инерции маятника относительно оси, проходящей через точку подвеса О, l – расстояние между ней и центром масс маятника, Ft= –mg sina» –mga. — возвращающая сила (знак минус обусловлен тем, что направления Ft и a всегда противоположны; sin a» a соответствует малым колебаниям маятника, т.е. малым отклонениям маятника из положения равновесия). Уравнение (142.4) можно записать в виде
Принимая
получим уравнение
идентичное с (142.1), решение которого (140.1) известно:
Из выражения (142.6) следует, что при малых колебаниях физический маятник совершает гармонические колебания с циклической частотой w0 (см. (142.5)) и периодом
где L=J/ (ml) — приведенная длина физического маятника. Точка О' на продолжении прямой ОС, отстоящая от точки О подвеса маятника на расстоянии приведенной длины L, называется центром качаний физического маятника (рис. 201). Применяя теорему Штейнера (16.1), получим
т. е. ОО' всегда больше ОС. Точка подвеса О маятника и центр качаний О' обладают свойством взаимозаменяемости: если точку подвеса перенести в центр качаний, то прежняя точка О подвеса станет новым центром качаний, и период колебаний физического маятника не изменится.
3. Математический маятник — это идеализированная система, состоящая из материальной точки массой т, подвешенной на нерастяжимой невесомой нити, и колеблющаяся под действием силы тяжести. Хорошим приближением математического маятника является небольшой тяжелый шарик, подвешенный на тонкой длинной нити. Момент инерции математического маятника
где l — длина маятника. Так как математический маятник можно представить как частный случай физического маятника, предположив, что вся его масса сосредоточена в одной точке — центре масс, то, подставив выражение (142.8) в формулу (1417), получим выражение для периода малых колебаний математического маятника
Сравнивая формулы (142.7) и (142.9), видим, что если приведенная длина L физического маятника равна длине l математического маятника, то периоды колебаний этих маятников одинаковы. Следовательно, приведенная длина физического маятника — это длина такого математического маятника, период колебаний которого совпадает с периодом колебаний данного физического маятника. Простая колебательная система при наличии трения. Рассмотрим простую механическую колебательную систему (рис. 1), состоящую из массы т, укрепленной на пружине имеющей упругость s. Масса находится в вязкой среде, создающей сопротивление трения r. Если конец пружины оттянут из положения равновесия на расстояние х, то пружина стремится сократиться с некоторой силой. Очевидно, что эта сила тем больше, чем на большее расстояние оттянута пружина и чем больше ее упругость. Отсюда возвращающая сила пружины Fs, стремящаяся вернуть оттянутый ее конец в положение равновесия, равна произведению xs, где х — расстояние, на которое оттянут конец пружины, a s — коэффициент упругости пружины.
Рис. 1. Простая механическая колебательная система В свою очередь s определяется как s=F s / x. Отсюда единицей упругости называется упругость такой пружины, которая при растяжении на единицу длины (1 м) стремится сократиться с силой, равной также единице (1 Н). Свойства пружины можно характеризовать и величиной, обратной коэффициенту упругости. Эта величина называется коэффициентом гибкости и обозначается буквой с: c =1/s и соответственно c=x/Fs. При перемещении тела возникают силы трения, тормозящие движение тела. При движении тела в вязкой среде значение силы трения Fr пропорционально скорости тела х и коэффициенту r, характеризующему среду, в которой возникает трение, и называемому обычно сопротивлением трения. Следует заметить, что сопротивление трения может возникать не только при движении тела в вязкой среде, но и в результате внутреннего трения, например, трения частиц в толще материала пружины при ее растяжении или сжатии. Сопротивление трения — одна из составляющих активного механического сопротивления. Характерной особенностью реальной механической системы (обладающей активным механическим сопротивлением) является то, что в ней всегда имеет место необратимый переход механической энергии в тепловую. Затухающие колебания. Все реальные колебательные системы являются диссипативными. Энергия механических колебаний такой системы постепенно расходуется на работу против сил трения, поэтому свободные колебания всегда затухают - их амплитуда постепенно уменьшается. Во многих случаях, когда отсутствует сухое трение, в первом приближении можно считать, что при небольших скоростях движения силы, вызывающие затухание механических колебаниях, пропорциональны скорости. Эти силы, независимо от их происхождения, называют силами сопротивления.
где r - коэффициент сопротивления, v - скорость движения. Запишем второй закон Ньютона для затухающих колебаний тела вдоль оси ОХ или
Перепишем это уравнение в следующем виде: и обозначим: где
Будем искать решение уравнения (7.19) в виде Продифференцируем два раза это выражение по времени t и, подставив значения первой и второй производных в уравнение (7.19), получим Решение этого, уравнения существенным образом зависит от знака коэффициента, стоящего при U. Рассмотрим случай, когда этот коэффициент положительный. Введем обозначение Таким образом, в случае малого сопротивления среды
График этой функции показан на рис. 7.8. Пунктирными линиями показаны пределы, в которых находится смещение колеблющейся точки. Величину Натуральный логарифм отношения амплитуд смещений, следующих друг за другом через промежуток времени, равный периоду Т, называют логарифмическим декрементом затухания.
Обозначим через τ промежуток времени, за который амплитуда колебаний уменьшается в е раз. Тогда
откуда Следовательно, коэффициент затухания есть физическая величина, обратная промежутку времени τ, в течение которого амплитуда убывает в е раз. Величина τ называется временем релаксации. Пусть N - число колебаний, после которых амплитуда уменьшается в е раз, Тогда
Следовательно, логарифмический декремент затухания δ есть физическая величина, обратная числу колебаний N, по истечению которого амплитуда убывает в е раз Дифференциальное уравнение и его решение. Дифференциальное уравнение свободных затухающих колебаний линейной системы определяется как
где s – колеблющаяся величина, которая описывает тот или иной физический процесс, δ = const — коэффициент затухания, ω0 - циклическая частота свободных незатухающих колебаний той же колебательной системы, т. е. при δ=0 (при отсутствии потерь энергии) называется собственной частотой колебательной системы. Решение уравнения (1) запишем в виде
где u=u(t). После взятия первой и второй производных (2) и подстановки их в выражение (1) найдем
Решение уравнения (3) зависит от знака коэффициента перед искомой величиной. Рассмотрим случай положителньного коэффициента:
(если (ω02 - σ2)>0, то такое обозначение мы вправе сделать). Тогда получим выражение
где
Характеристики затухающих колебаний: коэффициент затухания, логарифмический декремент затухания, добротность, время релаксации.
|













 (142.2)
(142.2) (142.3)
(142.3)
 (142.4)
(142.4)

 (142.5)
(142.5)
 (142.6)
(142.6) (142.7)
(142.7)

 (142.8)
(142.8) (142.9)
(142.9)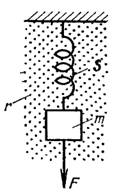




 представляет ту частоту, с которой совершались бы свободные колебания системы при отсутствии сопротивления среды, т.е. при r = 0. Эту частоту называют собственной частотой колебания системы; β - коэффициент затухания. Тогда
представляет ту частоту, с которой совершались бы свободные колебания системы при отсутствии сопротивления среды, т.е. при r = 0. Эту частоту называют собственной частотой колебания системы; β - коэффициент затухания. Тогда

 тогда С вещественным ω решением этого уравнения, как мы знаем, является функция
тогда С вещественным ω решением этого уравнения, как мы знаем, является функция 
 , решением уравнения (7.19) будет функция
, решением уравнения (7.19) будет функция

 называют собственной циклической частотой колебаний диссипативной системы. Затухающие колебания представляют собой непериодические колебания, т.к, в них никогда не повторяются, например, максимальные значения смещения, скорости и ускорения. Величину
называют собственной циклической частотой колебаний диссипативной системы. Затухающие колебания представляют собой непериодические колебания, т.к, в них никогда не повторяются, например, максимальные значения смещения, скорости и ускорения. Величину  обычно называют периодом затухающих колебаний, правильнее - условным периодом затухающих колебаний,
обычно называют периодом затухающих колебаний, правильнее - условным периодом затухающих колебаний,



 (1)
(1) (2)
(2) (3)
(3) (4)
(4) , у которого решение будет функция
, у которого решение будет функция  . Значит, решение уравнения (1) в случае малых затуханий (ω02 >> σ2)
. Значит, решение уравнения (1) в случае малых затуханий (ω02 >> σ2) (5)
(5) (6)
(6)


