Принцип работы
Стабилизация заданного положения вертолета основана на принципе регулирования по углу и угловой скорости, а также по барометрическому давлению при наличии жесткой обратной связи Обратная связь в АП осуществляется от датчиков обратной связи (ДОС) вмонтированных в комбинированные гидроусилители и кинематически связанных со штоками цилиндров комбинированного управления. Сигнал от ДОС подается на вход АУ и ИН-4. Чувствительные элементы АП подразделяются на датчики, фиксирующие угол отклонения и угловую скорость вращения вертолета относительно соответствующей оси вертолета. Чувствительными датчиками, воспринимающими угол отклонения вертолета, являются: 1) по направлению - гироагрегат курсовой системы КС-ЗГ (ГМК-1А); 2) по крену и тангажу — левый АГБ-3К. Кроме того, в каналах направления, крена и тангажа имеются датчики угловых скоростей (ДУС), которые фиксируют угловую скорость при отклонении вертолета относительно трех осей и выдают электрические сигналы, пропорциональные этим отклонениям; 3) по высоте — корректор высоты КВ-11; 4) по скорости - корректор-задатчик приборной скорости полета КЗСП. КЗСП вырабатывает сигналы, пропорциональные изменению скоростного напора (рд) при изменении скорости полета.
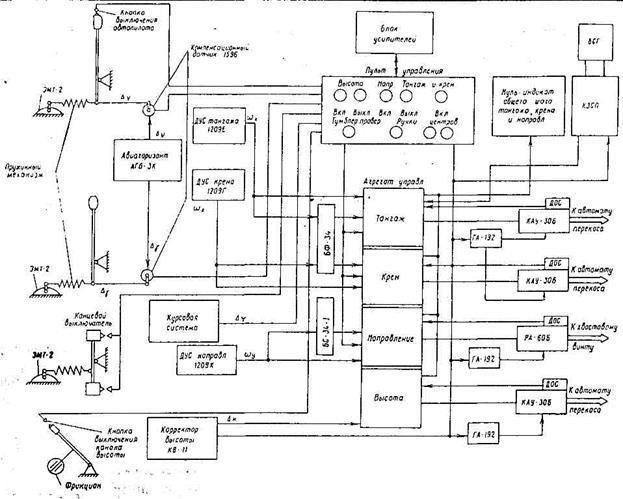
Рис.25. Блок схема автопилота
Сигналы с чувствительных датчиков поступают на вход АУ раздельно по каждому каналу, где суммируются преобразуются усиливаются и затем с выхода АУ подаются на обмотки поляризованных реле (РЭП) комбинированных гидроусилителей. Якорь поляризованного реле перемещается пропорционально сигналам чувствительных датчиков и вызывает перемещения золотника который в свою очередь вызывает перемещение выходного штока комбинированного гидроусилителя. Выходные штоки комбинированных гидроусилителей связаны с органами управления вертолетом и вызывают их отклонение в положение, при котором вертолет начнет возвращаться в исходное положение. Для предотвращения ухода вертолета в противоположную сторону с комбинированного гидроусилителя на вход АУ поступает сигнал противоположный по знаку управляющему. ИН-4 показывают пилоту положение штоков цилиндров комбинированного управления, когда АП стабилизирует положение вертолета. В работе АП можно выделить следующие режимы работы: включение питания и согласование каналов (обнуление входных сигналов); автоматическая стабилизация заданного положения (без вмешательства пилота в управление вертолетом); управление (комбинированное воздействие на органы управления вертолетом: от АП при одновременном вмешательстве пилота для внесения поправок или изменения режима полета); отключение АП. Основными режимами работы АП являются: режим автоматической стабилизации; режим управления. При включении питания АП силовая исполнительная часть не подключается к АП, происходит автоматическое обнуление сигналов чувствительных элементов и АП работает в режиме согласования. Обнуление сигналов должно произойти в течение не более 2 мин. Это необходимо с целью подготовки АП к включению каналов в заданном сбалансированном положении вертолета и исключения рывков и колебаний вертолета при подключении АП к силовым исполнительным элементам (комбинированным гидроусилителям). Время, необходимое для обнуления сигналов, не более 2 мин (при работающих АГБ-ЗК и ГМК-1А). После этого можно включать каналы. АП считается включенным в систему управления вертолетом тогда, когда комбинированные гидроусилители включены на управление от чувствительных элементов АП. Подключение гидроусилителей к АП осуществляется с помощью трех электромагнитных кранов ГА-192/2. Управление кранами от трех кнопок-ламп с зеленым светофильтром на ПУ. При нажатии кнопок внутри их загораются зеленые лампы, что свидетельствует что ГА-192/2 сработал и гидроусилители подключены к АП. Одновременно чувствительные элементы АП подключаются на вход АУ, а выход АУ подключен к поляризованным реле гидроусилителей. После этого АП будет работать в режиме автоматической стабилизации положения вертолёта. В этом режиме выходные штоки комбинированных гидроусилителей КАУ-З0Б могут перемещаться в пределах 20% их полного хода, при этом рычаги управления будут оставаться неподвижными, зафиксированными в заданном положении электромагнитными тормозами ЭМТ-2М (ручка управления и педали). Ручки «Шаг-Газ» стопорятся фрикционным механизмом. Комбинированный гидроусилитель РА-60Б, установленный в системе путевого управления, имеет возможность дополнительного перемещения выходного штока в полном диапазоне его хода, после выработки 20% хода. По условиям безопасности управления скорость дополнительного перемещения «перегонки» выбрана малой (порядка 10—20% от максимальной). При ручном управлении вертолетом (изменение режима полета) необходимо исключить воздействие на гидроусилители сигналов от датчиков угловых отклонений вертолета (АГБ-ЗК, гироагрегата курсовой системы). Для этой уели в систему продольного и поперечного управления включены компенсационные датчики (КДТ, КДК), которые кинематически связаны с ручкой управления и при ее перемещении выдают в АП сигналы, равные по величине и противоположные по знаку управляющим сигналам, поступающим от авиагоризонта АГБ-ЗК- Таким образом, пилот управляет вертолетом ручкой управления, не выключая автопилот, который непрерывно стабилизирует заданное летчиком положение вертолета за счет сигналов, поступающих от датчиков угла и угловых скоростей. Чтобы пилот мог управлять вертолетом по курсу при включенном автопилоте, на педалях ножного управления смонтированы гашетки и концевые выключатели, при нажатии которых происходит отключение датчиков угла и угловой скорости и перевод канала курса в режим согласования. Для управления по курсу при включенном АП необходимо нажать на гашетки педалей, при этом концевые выключатели отключают датчик угла курса (гироагрегат курсовой системы) и канал «направление» переводится в режим «согласование». После снятия ног с гашеток канал «Направление» автоматически включается и работает в режиме «стабилизация» нового курса вертолета. Для управления ручкой «Шаг — Газ» надо нажать кнопку «Фрикцион», при этом канал «Высота» автоматически отключается и переводится в режим согласования, а фрикцион растормаживается. После перемещения ручки «Шаг — Газ» в новое положение канал «Высота» необходимо включить снова кнопкой-лампой «Вкл. высота» на ПУ. В режиме «Управление» незначительные поправки в управление вертолетом (в пределах ±5°) по каналам направления, крена, тангажа можно вносить поворотом ручек центровки на пульте АП. При этом поворот ручки на 1 деление шкалы центровки соответствует 1° поправки по соответствующему каналу. При выключении АП или раздельном выключении каналов гидроусилители отключаются от АП и автопилот работает в режиме «согласование» (обнуление входных сигналов). Полное отключение АП производится АЗС автопилота.
|