РЕШЕНИЕ СТАТИЧЕСКИ ОПРЕДЕЛЕННЫХ ЗАДАЧ О РАВНОВЕСИИ СИСТЕМЫ ПРОИЗВОЛЬНО РАСПОЛОЖЕННЫХ СИЛ
Установленные для различных случаев расположения сил уравнения равновесия позволяют составить для каждого случая только определенное число сил, независимых уравнений, налагающих соответствующие условия на систему находящихся в равновесии сил. Мы можем, конечно, проецируя силы на различные оси и составляя уравнения моментов относительно различных центров, написать сколько угодно уравнений, но независимыми из них будут только три для общего случая плоской системы и только два для частных случаев плоской системы—сходящихся или параллельных сил. Задачи, в которых число неизвестных величин не превышает числа независимых уравнений равновесия, даваемых статикой твердого тела для данного случая расположения сил, называются статически определенными задачами, в противном случае задачи называются статически неопределенными. Методы решения статически неопределенных задач рассматриваются в сопротивлении материалов. При решении задач статики обычно исходят из того, что рассматриваемое в задаче тело находится в покое и, значит, согласно первой аксиоме на него действует уравновешенная система внешних сил. Приступая к решению такой задачи, где на тело действует произвольная плоская система сил, мы заранее знаем, что условие равновесия выполняется, т. е. если произвольная плоская система сил уравновешена, то ее главный вектор равен нулю и алгебраическая сумма моментов всех сил относительно любой точки также равна нулю.
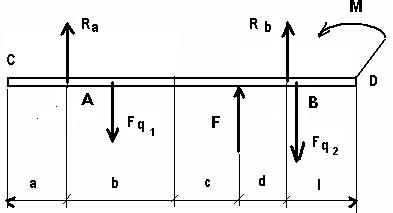
Первая форма уравнений равновесия вытекает непосредственно из условия, определяющих необходимое и достаточное условие равновесия плоской системы сил. ∑ Fkx = 0; ∑ Fky = 0; ∑ M0(Fk) = 0 (1) Следовательно, если плоская система сил уравновешена, то алгебраическая сумма проекций всех сил на оси X и Y равна нулю, а также Уравнений равновесия три, т.е. в произвольной плоской уравновешенной системе число неизвестных сил не должно превышать трех. Вторая форма уравнения равновесия получается, если вместо одного уравнения моментов составить два: ∑ MА(Fk) = 0; ∑ MВ(Fk) = 0; ∑ Fkx = 0 (2) и к ним добавить одно уравнение проекций на любую ось. Следовательно, если произвольная плоская система сил уравновешена, то алгебраическая сумма моментов сил относительно двух любых точек, а также алгебраическая сумма проекций сил на ось, не перпендикулярную прямой, проходящей через эти точки, равны нулю. Третья форма уравнения равновесия получается, если вместо уравнения проекций к двум уравнениям моментов относительно двух произвольно взятых точек А и В добавить третье уравнение моментов сил относительно какой-либо точки С, не лежащей на прямой АВ: ∑ MА(Fk) = 0; ∑ MВ(Fk) = 0; ∑ MС(Fk) = 0; (3) т. е. если произвольная плоская система сил уравновешена, то алгебраические суммы моментов сил относительно любых трех точек, не лежащих на одной прямой, равны нулю. ПРИМЕР РЕШЕНИЯ: Определить опорные реакции балки, изображенной на рисунке.
M = 25 Hм; q1 = 20 Нм q2 = 15 Нм; F = 30 Нм; а =1 м; b = 3, 5 м; c = 1 м; d = 1, 5 м; l = 1, 5 м
РЕШЕНИЕ: 1. Заменяем распределенную нагрузку равнодействующей Fq1 = q1 (a+b) = 20(1+3.5) = 90 кH (сила Fq1 приложена в середине отрезка (а +b) на расстоянии (b-a)/2 от опоры А) Fq2 = q2 (d+l) = 15(1.5+1.5) = 45 кH (сила Fq2 приложена в середине отрезка (d+l)) 2. Определим направление опорных реакций с учетом типа опоры – шарнирная 3. Составляем уравнения равновесия балки: ∑ Fkx = 0; ∑ Fky = 0; ∑ MA(Fk) = 0
RA –Fq1 + F + RB – Fq2 = 0 (1)
RA - 90 + 30 + RB – 45 = 0; RA+ RB = 105 Кн. - МА(Fq1) + МА (F) + МА(RB) - МА(Fq2) + М = 0 (2) -90*1, 25 + 30*4, 5 + RB* 6 – 45*6 + 25 = 0 RB = 37, 08 кН RA = 105 - RB = 105 - 37, 08 = 67, 92 кН
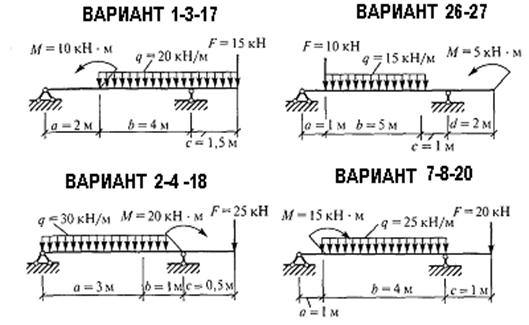
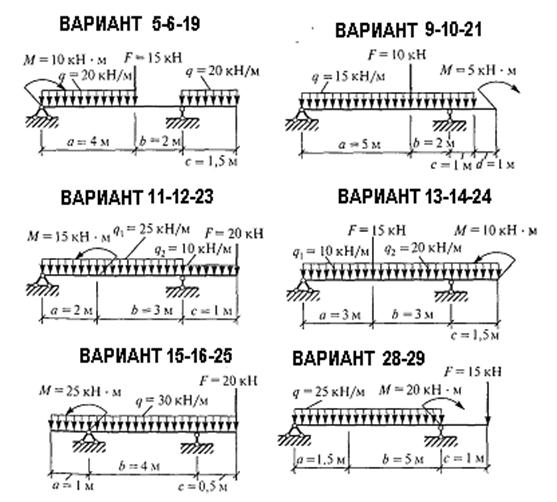
Реакции опор вертикальные и составляют 37, 08 и 67, 92 кН ЗАДАНИЕ: В соответствии с вариантом (см. таблицу) определить опорные реакции балки, использовав все формы уравнений равновесия (3 решения одной задачи)
|
 равна нулю алгебраическая сумма моментов всех сил относительно любой точки.
равна нулю алгебраическая сумма моментов всех сил относительно любой точки. ДАННЫЕ ЗАДАЧИ:
ДАННЫЕ ЗАДАЧИ: