Используя определение вектора ускорения (1.6) и формулу (2.1), получаем:

 (а)
(а)
Вычислим вектор  . Прежде всего, найдем направление этого вектора. Рассмотрим тождество
. Прежде всего, найдем направление этого вектора. Рассмотрим тождество

Дифференцируя это тождество по скалярному аргументу  , получаем:
, получаем:
 или
или 
Но  в общем случае вектор
в общем случае вектор  изменяет со временем свое направление, так что
изменяет со временем свое направление, так что  Следовательно, скалярное произведение обратилось в нуль потому, что сомножители взаимно перпендикулярны.
Следовательно, скалярное произведение обратилось в нуль потому, что сомножители взаимно перпендикулярны.
Таким образом, вектор  перпендикулярен касательной, т.е. направлен по нормали к траектории. Ранее было показано, что вектор ускорения лежит в соприкасающейся плоскости. Следовательно, речь идет о главной нормали. Таким образом,
перпендикулярен касательной, т.е. направлен по нормали к траектории. Ранее было показано, что вектор ускорения лежит в соприкасающейся плоскости. Следовательно, речь идет о главной нормали. Таким образом,
 (б)
(б)
Остается вычислить
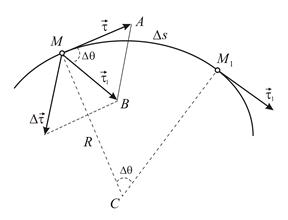 Пусть
Пусть  и
и  две близкие точки траектории. В точке проведем главную нормаль
две близкие точки траектории. В точке проведем главную нормаль  В точке построим нормаль
В точке построим нормаль  , пересекающую в точке
, пересекающую в точке  главную нормаль, построенную в точке (если траектория плоская кривая, то также будет главной нормалью). Угол между двумя близкими касательными, угол
главную нормаль, построенную в точке (если траектория плоская кривая, то также будет главной нормалью). Угол между двумя близкими касательными, угол  , называется углом смежности. В силу близости точек и угол между нормалями
, называется углом смежности. В силу близости точек и угол между нормалями  и приближенно равен углу (для плоской кривой это равенство точное). В силу малости дугу
и приближенно равен углу (для плоской кривой это равенство точное). В силу малости дугу  можно считать дугой окружности радиуса
можно считать дугой окружности радиуса  . Тогда
. Тогда  Из равнобедренного треугольника
Из равнобедренного треугольника  определяем
определяем

Тогда
где  — предельное значение радиуса окружности, дуга которой в бесконечно малой окрестности точки совпадает с дугой траектории. Эта окружность расположена в соприкасающейся плоскости, построенной для точки . Ее центр лежит на главной нормали и называется центром кривизны траектории в точке . Ее радиус называется радиусом кривизны траектории в точке .
— предельное значение радиуса окружности, дуга которой в бесконечно малой окрестности точки совпадает с дугой траектории. Эта окружность расположена в соприкасающейся плоскости, построенной для точки . Ее центр лежит на главной нормали и называется центром кривизны траектории в точке . Ее радиус называется радиусом кривизны траектории в точке .
Окончательно получаем:

Совокупность приложенных к телу сил называется системой сил.




