Курсовертикали
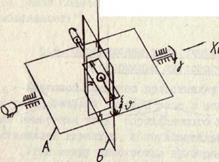
Для исключения кардановой ошибки необходимо ось внешней рамки подвеса курсового гироскопа удерживать в вертикальном положении. Это достигается с помощью свободной или силовой гировертикали. На рис. 5.10 изображена схема курсового гироскопа, система основного подвеса которого дополнена двумя рамками А и Б. Ось одной из дополнительных рамок направлена по продольной оси ЛА
Рис. 5.10. Кинематическая схема курсового гироскопа без кардановой ошибки
Развитием схемы на рис. 5.10 является объединение невыбиваемой гировертикали (см. рис. 5.6) и курсового гироскопа в одном приборе двухгироскопной курсовертикали (рис. 5.11). Дополнительная рамка гировертикали ГB одновременно является дополнительной рамкой А курсового гироскопа КГ. Поэтому отпадает надобность в следящей системе, в подвесе курсового гироскопа. Дополнительная рамка Б курсового гироскопа управляется с помощью следящей системы, связанной с гировертикалью, а исполнительное устройство отрабатывает измеренное значение в курсовом гироскопе.
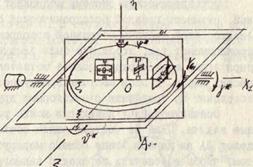
Рис. 5.11 Кинематическая схема двухгироскопной курсовертикали В качестве курсовертикали можно также использовать трехкомпонентную гироплатформу с тремя двухстепенными гироскопами. Для обеспечения невыбиваемости этой трехгироскопной курсовертикали поместим ее в дополнительной рамке А (рис. 5.12), в результате чего подучим трехкомпонентную четырехосевую гироплатформу. Дополнительной рамкой необходимо управлять так, чтобы обеспечивалась взаимно перпендикулярное расположение плоскостей рамок подвеса платформы.
Рис. 5.12. Кинематическая схема трехкомпонентной четырехосевой гиро-платформы
|
 . Дополнительные рамки управляются с помощью следящих систем. Чувствительные элементы следящих систем, помещенные на осях гировертикали, измеряют углы крена
. Дополнительные рамки управляются с помощью следящих систем. Чувствительные элементы следящих систем, помещенные на осях гировертикали, измеряют углы крена  и тангажа
и тангажа  . Исполнительные устройства следящих систем (двигатели с редукторами), помещенные на осях дополнительных рамок курсового гироскопа, отрабатывают измеренные значения
. Исполнительные устройства следящих систем (двигатели с редукторами), помещенные на осях дополнительных рамок курсового гироскопа, отрабатывают измеренные значения  . Кроме того, с помощью системы коррекции обеспечивается взаимно перпендикулярное расположение плоскостей внешней и внутренней рамок основного подвеса курсового гироскопа.
. Кроме того, с помощью системы коррекции обеспечивается взаимно перпендикулярное расположение плоскостей внешней и внутренней рамок основного подвеса курсового гироскопа.