Невыбиваемая гировертикаль
Установим гировертикаль на ЛА, выполняющем произвольные маневры. Допустим, что ЛА, вращаясь вокруг своей поперечной оси z, совершает в вертикальной плоскости маневр типа полупетли или петли Нестерова. Тогда при Уничтожение одной из степеней свободы лишает гироскоп устойчивости. Происходит заваливание или так называемое "выбивание", гировертикали. Действительно, гироскоп перестает сопротивляться усилиям, стремящимся изменить направление его главной оси. К таким усилиям относятся, например, удары по внутренней рамке подвеса гироскопа, повороты ЛА вокруг его нормальной оси.
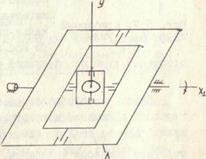
Рис. 5.6. Кинематическая схема невыбиваемой гировертикали
Заметим, что если ось внешней рамки подвеса гировертикали установить не по продольной оси ЛА Наибольшей устойчивостью (сопротивляемостью внешним воздействиям) гироскоп обладает при взаимно перпендикулярном расположении главной оси и осей подвеса. Чтобы обеспечить взаимно перпендикулярное расположение оси внешней рамки подвеса и главной оси гироскопа при любых эволюциях ЛА, систему основного подвеса гировертикали дополняют еще одной рамкой (рис. 5.6). Дополнительной рамкой следует управлять так, чтобы сохранялось взаимно перпендикулярное расположение плоскостей рамок подвеса гировертикали и тем самым ее устойчивость ("невыбиваемость").
|
 = ±90° продольная ось
= ±90° продольная ось  займет вертикальное положение у и плоскости рамок подвеса гировертикали совпадут, что практически приведет к потере одной степени свободы гироскопа (рис. 5.5).
займет вертикальное положение у и плоскости рамок подвеса гировертикали совпадут, что практически приведет к потере одной степени свободы гироскопа (рис. 5.5).