Гировертикаль, установленная на ЛА, позволяет определить угловое положение ЛА относительно горизонтальной плоскости. Положение ЛА по отношению к плоскости горизонта можно определить двумя углами.
Возьмем системы координат  и
и  с общим началом, расположенным в центре массы ЛА (рис. 5.4). Ось У системы направим вертикально вверх по главной оси гироскопа (рис. 5.5). Оси х и у, расположенные горизонтально, фиксируют положение горизонтальной плоскости. Вертикальную плоскость
с общим началом, расположенным в центре массы ЛА (рис. 5.4). Ось У системы направим вертикально вверх по главной оси гироскопа (рис. 5.5). Оси х и у, расположенные горизонтально, фиксируют положение горизонтальной плоскости. Вертикальную плоскость  ориентируем так, чтобы она проходила через продольную ось ЛА. Очевидно, что ось х будет совпадать с горизонтальной проекцией продольной оси ЛА. Систему координат называют стабилизированной (относительно горизонта) системой координат.
ориентируем так, чтобы она проходила через продольную ось ЛА. Очевидно, что ось х будет совпадать с горизонтальной проекцией продольной оси ЛА. Систему координат называют стабилизированной (относительно горизонта) системой координат.
Оси системы координат (рис. 5.5) направим по продольной (строительной) оси ( ), нормальной к оси (
), нормальной к оси ( ) и поперечной (боковой) оси (
) и поперечной (боковой) оси ( ) ЛА. Систему координат называют связанной системой координат. Вертикальную плоскость
) ЛА. Систему координат называют связанной системой координат. Вертикальную плоскость  (рис. 5.5), проходящую через продольную ось ЛА, будем называть плоскостью приборного курса. (В рассматриваемом случае координатная плоскость совпадает с плоскостью приборного курса ЛА.)
(рис. 5.5), проходящую через продольную ось ЛА, будем называть плоскостью приборного курса. (В рассматриваемом случае координатная плоскость совпадает с плоскостью приборного курса ЛА.)
Гировертикаль установим на ЛА таким образом, чтобы ось внешней рамки подвеса гироскопа совпадала с осью х1 системы координат и, следовательно, с продольной осью ЛА, а ось внутренней рамки - с горизонтальной осью z системы координат (рис. 5.5)
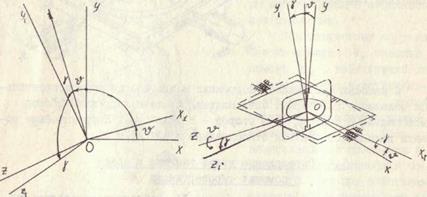
Рис.5.4.Углы тангажа  и крена
и крена  Рис.5.5.Кинематическая схема гировертикали
Рис.5.5.Кинематическая схема гировертикали
Допустим, что в исходном положении оси совпадают с осями и внешняя рамка подвеса гироскопа располагается горизонтально (на рис. 5.5 показана пунктирной линией).
Летательный аппарат, являющийся основанием гировертикали, можно привести в произвольное положение относительно горизонтальной плоскости Охz двумя последовательными поворотами. Первый поворот основания гировертикали (на угол ) выполним вокруг оси внутренней рамки подвеса, т.е. вокруг оси z. Внутренняя рамка подвеса гировертикали, удерживаемая гироскопом, сохранит прежнее положение, а внешняя рамка повернется вместе с основанием гировертикали и займет положение, показанное на рис. 5.5 сплошной линией. Второй поворот основания гировертикали (на угол ) выполним вокруг оси внешней рамки подвеса, т.е. вокруг оси х1. При этом внешняя рамка, удерживаемая гироскопом, сохранит прежнее положение.
Угол наклона продольной оси x1 относительно горизонта называют углом тангажа ЛА, угол между плоскостью симметрии  и плоскостью приборного курса - углом крена ЛА. Угол тангажа и изменяется в пределах
и плоскостью приборного курса - углом крена ЛА. Угол тангажа и изменяется в пределах  , а угол крена - в пределах ±180°.
, а угол крена - в пределах ±180°.
Угол равен дополнению до 90° угла между плоскостями внешней и внутренней рамок подвеса гироскопа. Угол равен повороту основания гироскопа относительно внешней рамки подвеса. Углы и , определяющие положение основания гировертикали относительно горизонтальной плоскости, можно определить по шкалам или снять с помощью каких-либо датчиков, например, потенциометрических или индуктивных, помещенных на осях рамок подвеса гировертикали.




