
Классификация кинематических пар
Кинематические пары различают и классифицируют по различным признакам. 1) По числу связей, налагаемых на относительное движение звеньев. Всякое свободно движущееся в пространстве абсолютно твердое тело обладает шестью степенями свободы или шестью видами независимых возможных движений. Вхождение двух звеньев в кинематическую пару налагает на их относительное движение некоторые ограничения или условия связи; класс кинематической пары (номер класса совпадает с числом условий связи S) всегда находится в пределах от 1 до 5, число оставшихся подвижностей H дополняет число связей до шести, т.е. На рис. 1.1 представлены примеры кинематических пар 1 – 5 классов. 2) По характеру контакта звеньев различают пары низшие (требуемое относительное движение звеньев можно получить постоянным соприкасанием их элементов по поверхности) и высшие (требуемое относительное движение можно получить только соприкасанием их элементов по линиям и в точках). Например, трехподвижная пара по 3) По области относительного движения звеньев пары могут быть плоскими (траектории всех точек в относительном движении звеньев – плоские кривые, расположенные в параллельных плоскостях) и пространственными. Плоская одноподвижная пара может быть либо вращательной (шарниром – рис. 1.1, д), либо поступательной (рис. 1.1, е); пространственная пара может быть, например, винтовой (одноподвижная), цилиндрической (двухподвижная), сферической (двух- и трехподвижная) и т.д. Механизм, звенья которого образуют только вращательные, поступательные, цилиндрические и сферические пары, называют рычажным.
Виды звеньев (рис. 1.2 и рис. 1.3):
стойка – звено, принимаемое за неподвижное; такое звено в механизме может быть только одно; кривошип – вращающееся звено рычажного механизма, которое может совершать полный оборот вокруг неподвижной оси; коромысло – вращающееся звено рычажного механизма, которое может совершать только неполный оборот вокруг неподвижной оси; шатун – звено рычажного механизма, образующее кинематические пары только с подвижными звеньями;
кулиса – звено рычажного механизма, вращающееся вокруг неподвижной оси и образующее с другим подвижным звеном поступательную пару; в зависимости от степени протяженности элемента поступательной пары различают «камень» (звено меньшей протяженности) и «направляющую»; ползун – звено рычажного механизма, образующее поступательную пару со стойкой; кулачок – звено, имеющее элемент высшей пары, выполненный в виде поверхности переменной кривизны; зубчатое колесо – звено с замкнутой системой зубьев, обеспечивающее непрерывное движение другого зубчатого колеса или рейки. Систему звеньев, связанных между собой кинематическими парами, называют кинематической цепью.
|
 , поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.
, поэтому пару пятого класса называют одноподвижной, четвертого – двухподвижной и т.д.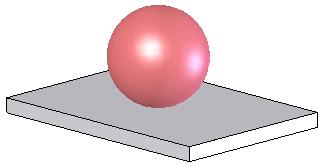
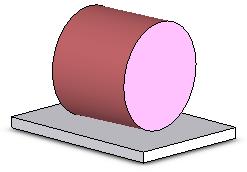



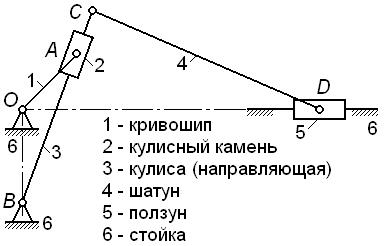 Рис. 1.2
Рис. 1.2




