
Расчет группы винтов, нагруженных сдвигающей силой
Рассчитать группу винтов крепления пластин, нагруженных сдвигающей силой (рис. 2.1.3.1). Соединение нагружено постоянной внешней силой F = 8000 Н, действующей под углом Коэффициент трения в резьбе и на поверхности соединяемых деталей
Задачу решить в двух вариантах: а) винты установлены в отверстие с зазором; б) винты установлены без зазора. Расчет Решение задачи следует начинать с определения наиболее нагруженного винта соединения и действующей на него нагрузки, а затем переходить к нахождению отвечающего заданным условиям диаметра винта, который будет зависеть от варианта установки. Центр тяжести стыка. Поскольку приложенная внешняя нагрузка действует в плоскости стыка, то критерием расчета соединения является отсутствие относительного сдвига соединенных поверхностей, т. е. критерий несдвигаемости. Так как винты в соединении расположены несимметрично относительно оси у, необходимо определить положение центра сдвига С, который при действии момента вращения совпадет с центром тяжести геометрической фигуры, образованной из совокупности поперечных сечений крепежных деталей. Координаты центра тяжести равны:
где z — число винтов в соединении,
тела винта. Сила, действующая на наиболее нагруженный винт. Далее перенесем внешнюю нагрузку в центр сдвига, заменив тем самым заданную расчетную схему на-гружения эквивалентной (рис. 2.1.3.2). Эквивалентная схема помимо сдвигающей силы F — 8000 Н имеет момент вращения относительно центра, равный
Так как расчет прочности группового винтового соединения сводится к расчету изолированного винта, нагруженного наибольшей сдвигающей силой обходимо определить наиболее нагруженный винт. Как видно из рис. 2.1.3.3, на котором изображена схема нагружения самых удаленных от центра сдвига винтов соединения, наиболее нагруженными являются винты, расположенные в точках А и В, так как полная нагрузка на винт зависит не только от его удаленности от центра сдвига С, но еще и от угла между компонентами сил, составляющими полное сдвигающее усилие. 92 Глава 2. Соединения элементов машин Силу, действующую на произвольно размещенный вить в виде векторной суммы двух составляющих: реактивной силы
|
 . Расстояние между винтами а = 50 мм. Класс прочности винтов — 4.6.
. Расстояние между винтами а = 50 мм. Класс прочности винтов — 4.6. = 0,15.
= 0,15.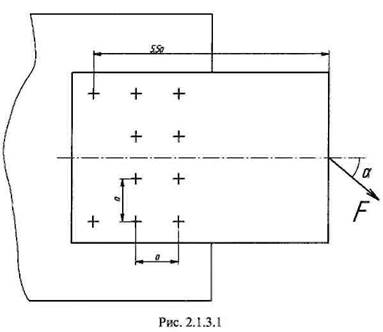
 = 0 (соединение симметрично относительно оси х);
= 0 (соединение симметрично относительно оси х);
 — координаты размещения крепежных деталей относительно оси
— координаты размещения крепежных деталей относительно оси  (рис. 2.1.3.2),
(рис. 2.1.3.2),  — площадь поперечного сечения
— площадь поперечного сечения


 , то не-
, то не- винт, можно предста-
винт, можно предста- , вы-
, вы-


