
Снижение ошибки от сигнала задания введением сигнала КУ после регулятора.
На рисунке показаны структурные схемы исходной и преобразованной системы. Для последней легко записать уравнение движения:
|
Снижение ошибки от сигнала задания введением сигнала КУ после регулятора.
На рисунке показаны структурные схемы исходной и преобразованной системы. Для последней легко записать уравнение движения:
|

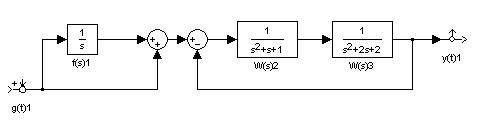

 - условие полной инвариантности к g(t) (оно наблюдается, если выходной сигнал четко повторяет входной, поэтому его можно получить, приравняв Фэк(s) к 1 или же Фэкз(s) к нулю, т.к. Фэкз(s)=1- Фэк(s).
- условие полной инвариантности к g(t) (оно наблюдается, если выходной сигнал четко повторяет входной, поэтому его можно получить, приравняв Фэк(s) к 1 или же Фэкз(s) к нулю, т.к. Фэкз(s)=1- Фэк(s).


