
Обратных cвязей
Введение не 1-ых ОС (
Для показанной на рисунке системы с не 1-ой ОС уравнение движения будет иметь вид:
Разложим 1-1/W(s) в ряд по возрастающим степеням оператора, тогда:
Поскольку знаменатели функций Ф(s) (c 1-ой ОС) и Фж(s) не равны, введение изменит характеристическое уравнение системы. А при полном выполнении условия инвариантности система будет находиться на границе устойчивости. 7. Контрольные вопросы 1. Дать определение точности. 2. Способы повышения точности системы автоматического управления. 3. Достоинства и недостатки приведенных методов повышения точности систем автоматического управления.
|
 ) позволяет уменьшить ошибку g(t) вызванную задающим воздействие в замкнутой системе.
) позволяет уменьшить ошибку g(t) вызванную задающим воздействие в замкнутой системе.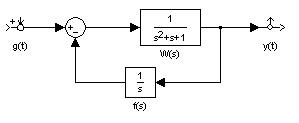

 - условие полной инвариантности к g(t) (оно наблюдается если выходной сигнал четко повторяет входной, поэтому его можно получить, приравняв Фэк(s) к 1 или же Фэкх(s) к нулю, т.к. Фэкх(s)=1- Фэк(s)).
- условие полной инвариантности к g(t) (оно наблюдается если выходной сигнал четко повторяет входной, поэтому его можно получить, приравняв Фэк(s) к 1 или же Фэкх(s) к нулю, т.к. Фэкх(s)=1- Фэк(s)). т.е. ПФ
т.е. ПФ 


