Задача 2.3
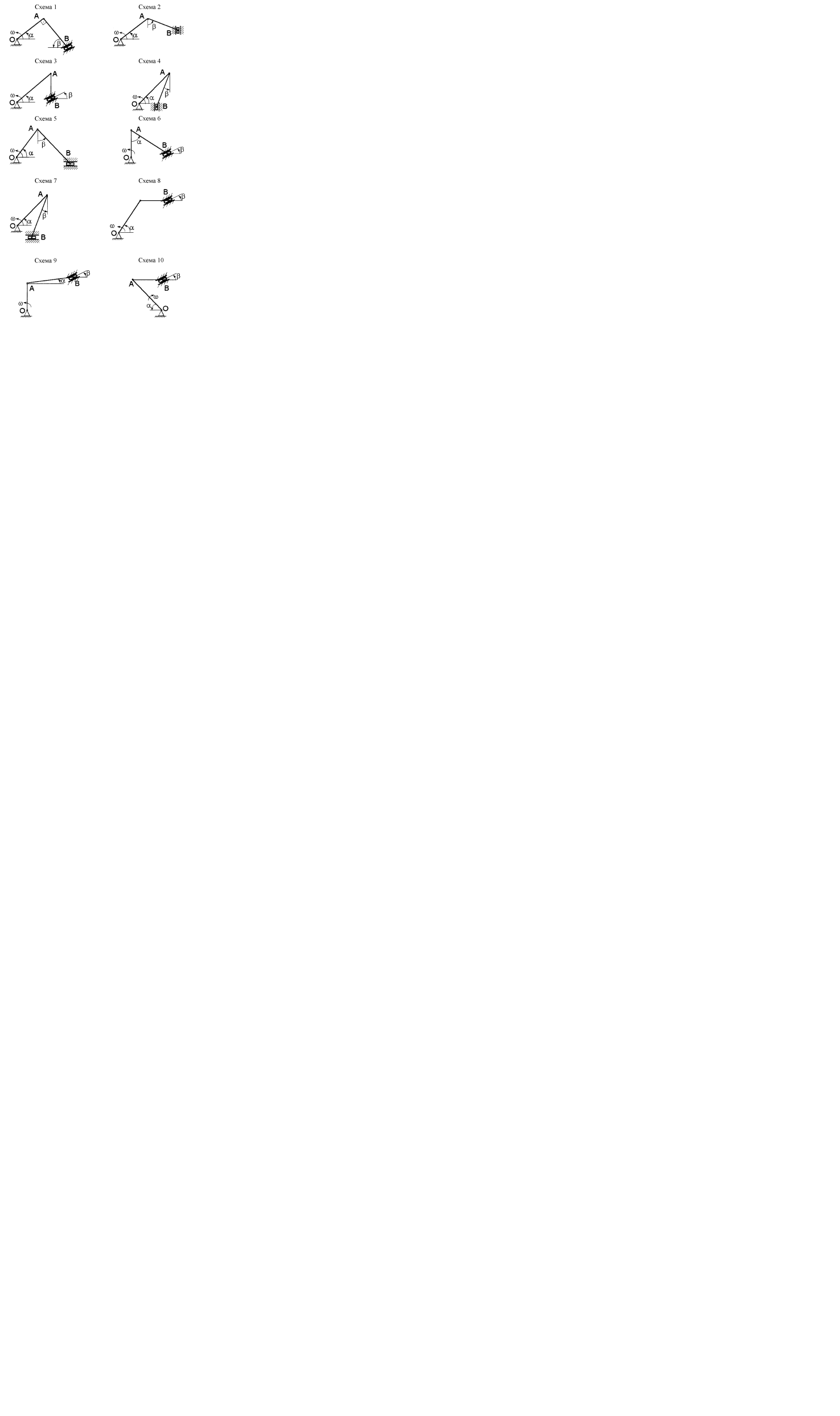
Задача 2.3 относится к плоскому движению твердого тела. Скорость ползуна для данного положения механизма можно вычислить с помощью как теоремы о проекциях скоростей двух точек тела, так и мгновенного центра скоростей шатуна. Для этого необходимо знать скорость какой-нибудь точки шатуна (например точки А) и направление скорости ползуна. Ускорение ползуна в данный момент времени можно найти с помощью векторной формулы распределения ускорений точек плоской фигуры, спроектировав ее на два взаимно перпендикулярных направления. В качестве полюса удобно выбрать точку А. Исходные данные к задаче даны в табл. 2.4. и на рис.2.7. Условие: Кривошип ОА длиной R вращается вокруг неподвижной оси О с постоянной угловой скоростью w и приводит в движение шатун АВ длиной L и ползун В. Для заданного положения механизма найти скорость и ускорение ползуна В. Примечание. Если при заданных значениях углов окажется, что шатун АВ перпендикулярен направляющим ползуна (см. рис. 2.7, схемы 1, 6), то значение угла b следует принять равным 15°. Таблица 2.4
Рис. 2.7. Схемы к задаче 2.3.
|
 b,
град
b,
град