
Постановка задач
(6.1) где mi – масса i-го звена ,aSi – ускорение его центра масс. Например, для механизма на рис. 6.1 центры масс 2-го и 3-го звеньев имеют ускорения и возникают соответствующие силы инерции.
Мероприятия, направленные на уменьшение описанных сил или компенсацию их воздействия на кинематические пары называется уравновешиванием. Различают два типа уравновешивания: 1. Статическое – компенсация воздействия сил инерции. 2. Моментное (иногда его называют динамическим) – компенсация воздействия моментов сил инерции. Совокупность статического и моментного будем называть полным уравновешиванием. Как статическое, так и моментное уравновешивание в свою очередь подразделяют еще на: 1. Уравновешивание при известном расположении неуравновешенных масс. 2. Уравновешивание при неизвестном расположении неуравновешенных масс.
|
 При работе механизмов центры масс звеньев могут двигаться с ускорениями. Поэтому возникают силы инерции:
При работе механизмов центры масс звеньев могут двигаться с ускорениями. Поэтому возникают силы инерции: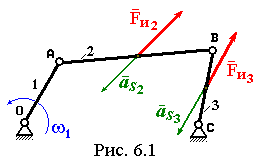 Эти силы вызывают дополнительные реакции в кинематических парах, что увеличивает их износ. Кроме того, эти силы, переменные по величине и направлению, являются причиной вибраций, следовательно, появляется опасность резонансных явлений, которые могут привести к авариям. И, наконец, эти силы воспринимаются опорами механизма, через которые передаются на стойку. Последнее явление получило название внешней виброактивности механизма. Для таких устройств, как электро- и бензопилы, дрели, отбойные молотки и т.п. стойкой являются руки оператора, и такие воздействия могут привести к развитию так называемой вибрационной болезни. Из всего сказанного следует, что с этими воздействиями надо бороться.
Эти силы вызывают дополнительные реакции в кинематических парах, что увеличивает их износ. Кроме того, эти силы, переменные по величине и направлению, являются причиной вибраций, следовательно, появляется опасность резонансных явлений, которые могут привести к авариям. И, наконец, эти силы воспринимаются опорами механизма, через которые передаются на стойку. Последнее явление получило название внешней виброактивности механизма. Для таких устройств, как электро- и бензопилы, дрели, отбойные молотки и т.п. стойкой являются руки оператора, и такие воздействия могут привести к развитию так называемой вибрационной болезни. Из всего сказанного следует, что с этими воздействиями надо бороться.


